Introduction
HRC (Human Robot Collaboration) Model 4 is a 6-DOF robotic arm equipped with a depth camera, a force-feedback-enabled gripper and a tele[……]
September 5, 2023 Tech No comments
HRC (Human Robot Collaboration) Model 4 is a 6-DOF robotic arm equipped with a depth camera, a force-feedback-enabled gripper and a tele[……]
September 10, 2022 Tech No comments
HRC (Human Robot Collaboration) Model 0 is a 1.9-foot, 11-DOF bipedal robot equipped with an Inertial Measurement Unit (IMU) and it achi[……]
Although Lidars are getting cheaper these days, 3D lidar can still cost >$4000 such as VLP-16. An alternative approach is to create a 3D[……]
October 24, 2021 Tech No comments
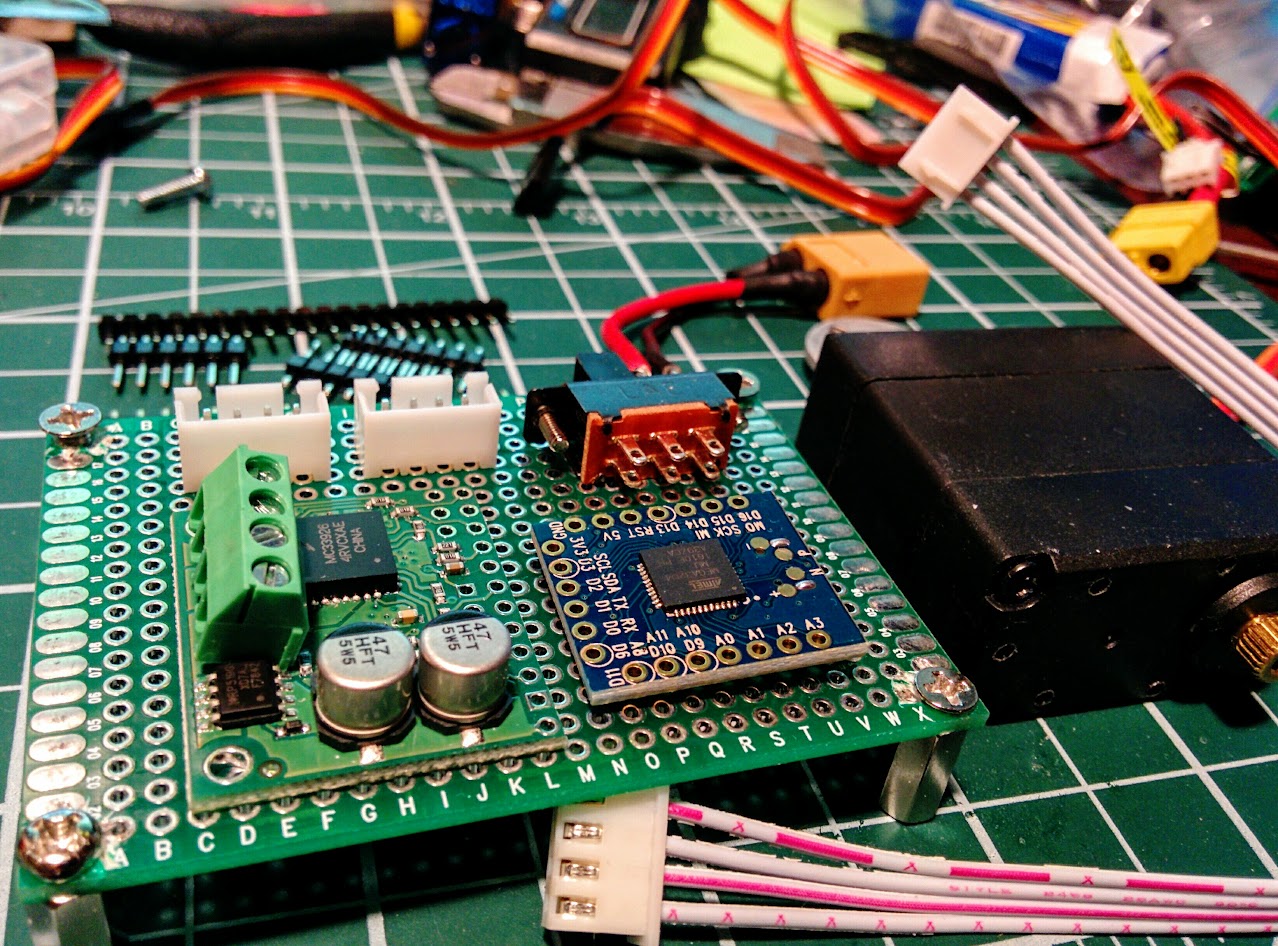
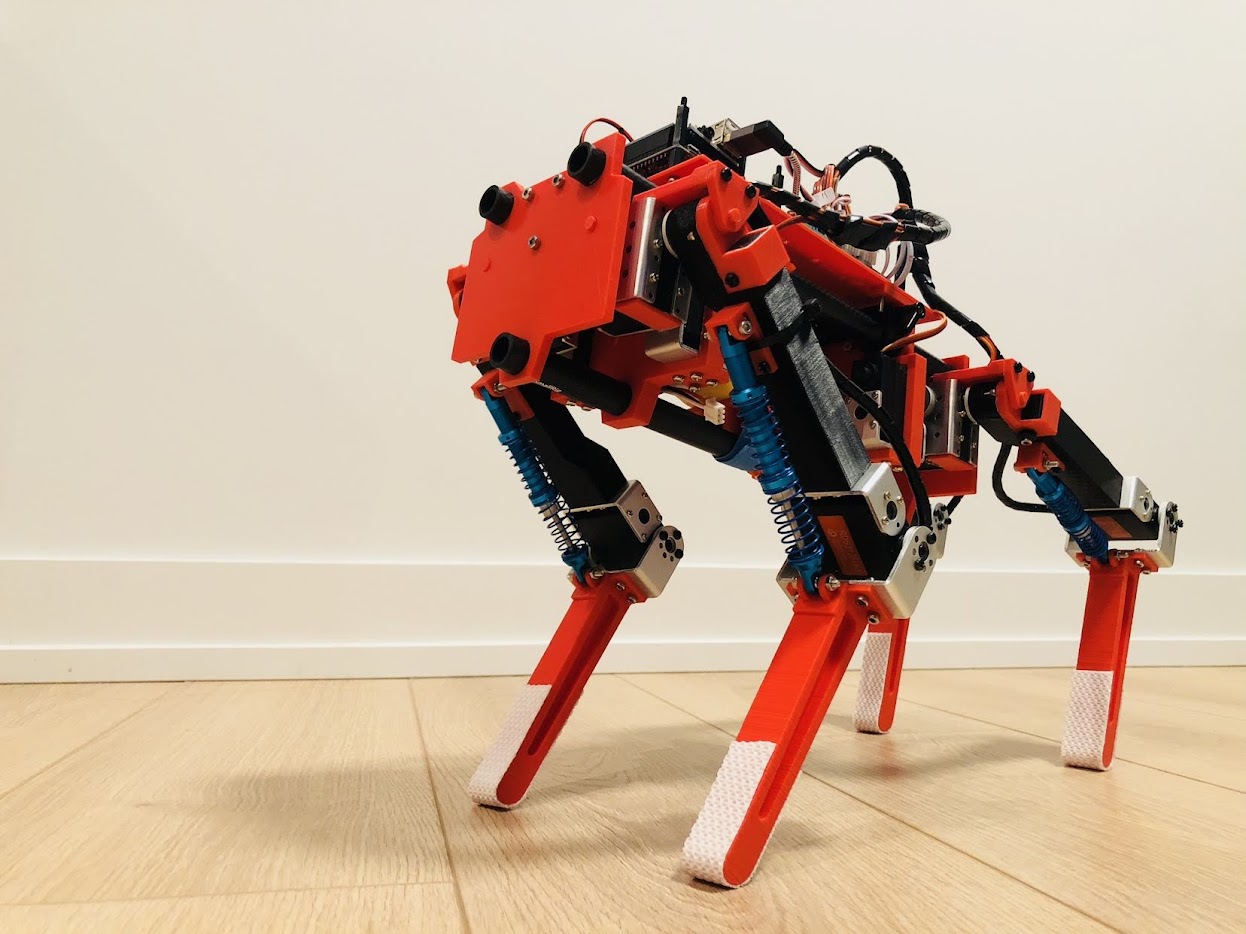
ChiTu II is a ROS-enabled quadruped robot actuated by 12 9g-level metal servo motors. It is an upgraded version of Quadruped ChiTu with[……]
June 26, 2021 Tech No comments
A ROS-enabled quadruped robot built with very powerful 46kg.cm servo motors. It is equipped with IMU and controlled with Nvidia Jetson N[……]
May 4, 2021 Tech 2 comments
Yuki Mini is a 12 DOF quadruped robot. It is controlled with a Raspberry Pi, an IMU, and off-the-shelf 9g-level servo motors. And it use[……]
September 6, 2020 Tech 4 comments
A ROS-enabled mini quadruped robot. A brand new design that is a very mini (and low-cost <$100) version of Quadruped Tsuki. It is sma[……]
October 13, 2019 Tech 9 comments
A ROS-enabled highly-dynamic quadruped robot. A brand new design that is stronger, faster and more robust than Quadruped Kaze.
September 7, 2019 Tech 2 comments
A ROS-enabled heavy-load quadruped robot built with strong RDS 3135 servo motor. A simple python library is introduced for multiple serv[……]
September 1, 2019 Tech 2 comments
I wrote an article on ROS servo motor control two years ago, and the method was successfully applied in my previous 9g Quadruped Robot project. Later,[……]
January 4, 2018 Tech 2 comments tech
A low-cost ROS navigation platform equipped with:
* Odroid XU4 ~$80
* YD Lidar ~$80
* STM32 base board ~$40
* Battery ~$20
* Chassis with 2xDC mo[……]
November 18, 2016 Tech No comments
Bomlist:
November 18, 2016 Tech No comments
The basic idea is to build a smart servo like Dynamixel, which is expensive and has more features than regular RC servos of course.
Fir[……]
October 7, 2016 Tech No comments
September 29, 2016 Tech No comments
Previous posts:
* inspiRED Leg Upgrade [step 0]: Fusion360 model
* inspiRED Leg Upgrade [step 1]: Laser Cutting Parts
I got some new longer shock a[……]
September 18, 2016 Tech No comments
{<1>}
This project involves building an indoor self-driving mobile platform featured with laser scanner and ROS support. Here are some important fe[……]
September 18, 2016 Tech 2 comments
Previous post: inspiRED Leg Upgrade [step 0]: Fusion360 model
I recently got inspiRED Leg version 1.0 ready for my humanoid bipedal robot project wit[……]
September 6, 2016 Tech 5 comments
I recently got started reworking on the leg of my inpiRED bipedal Humanoid robot project. The basic idea is to draw all the CAD files using Fusion 360[……]
August 13, 2015 Tech No comments Odroid
This article shows you how to drive a hobby servo using Odroid U3.
Upload this to your Arduino board: