Introduction
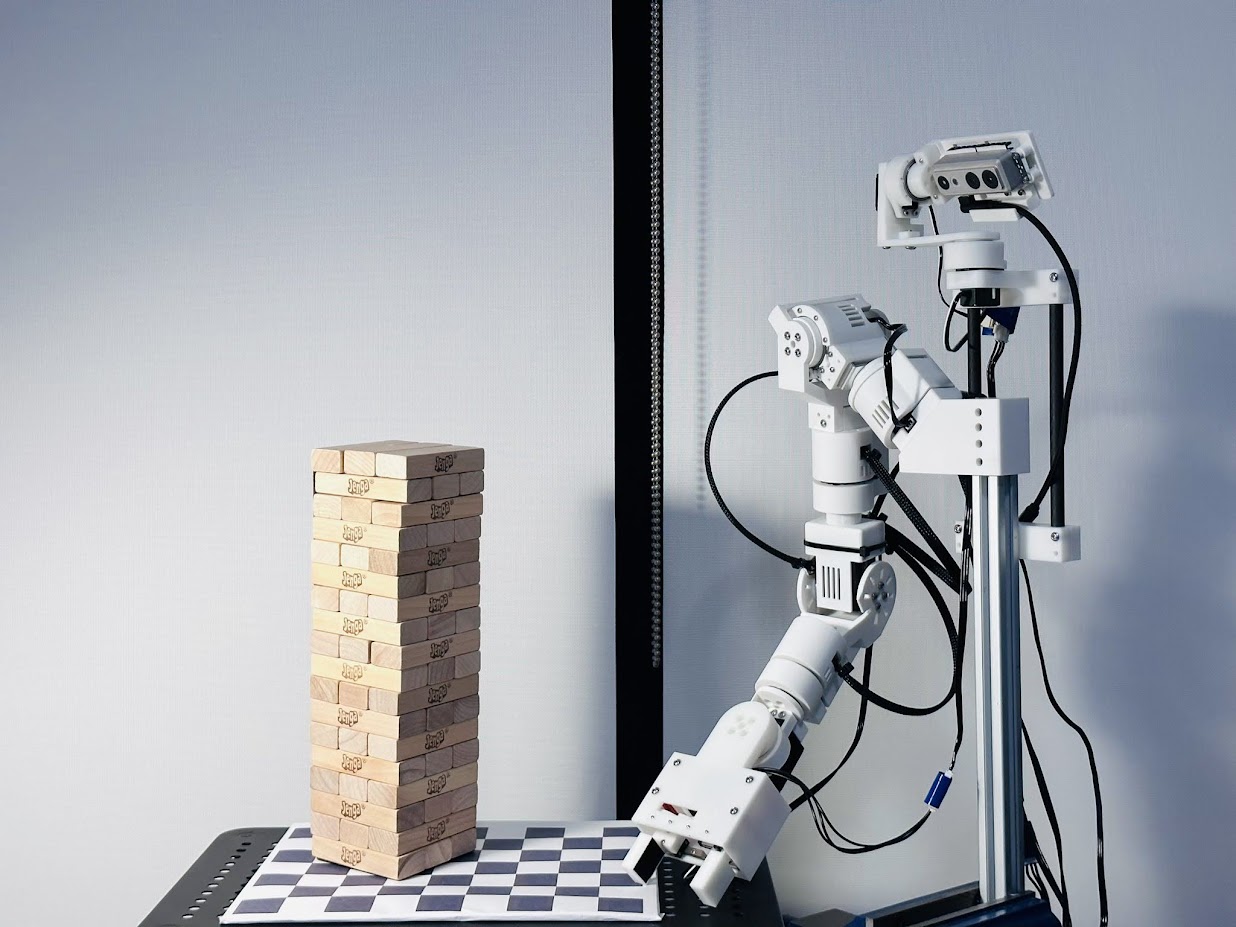
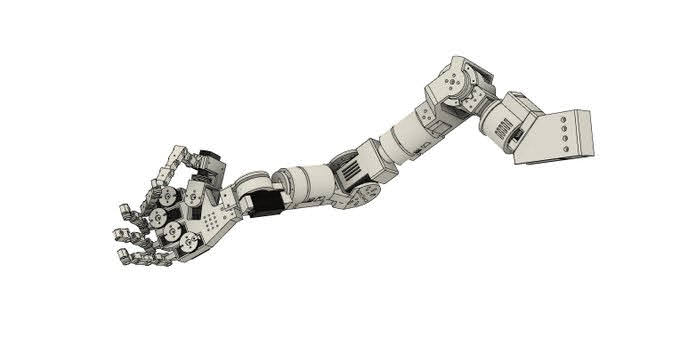
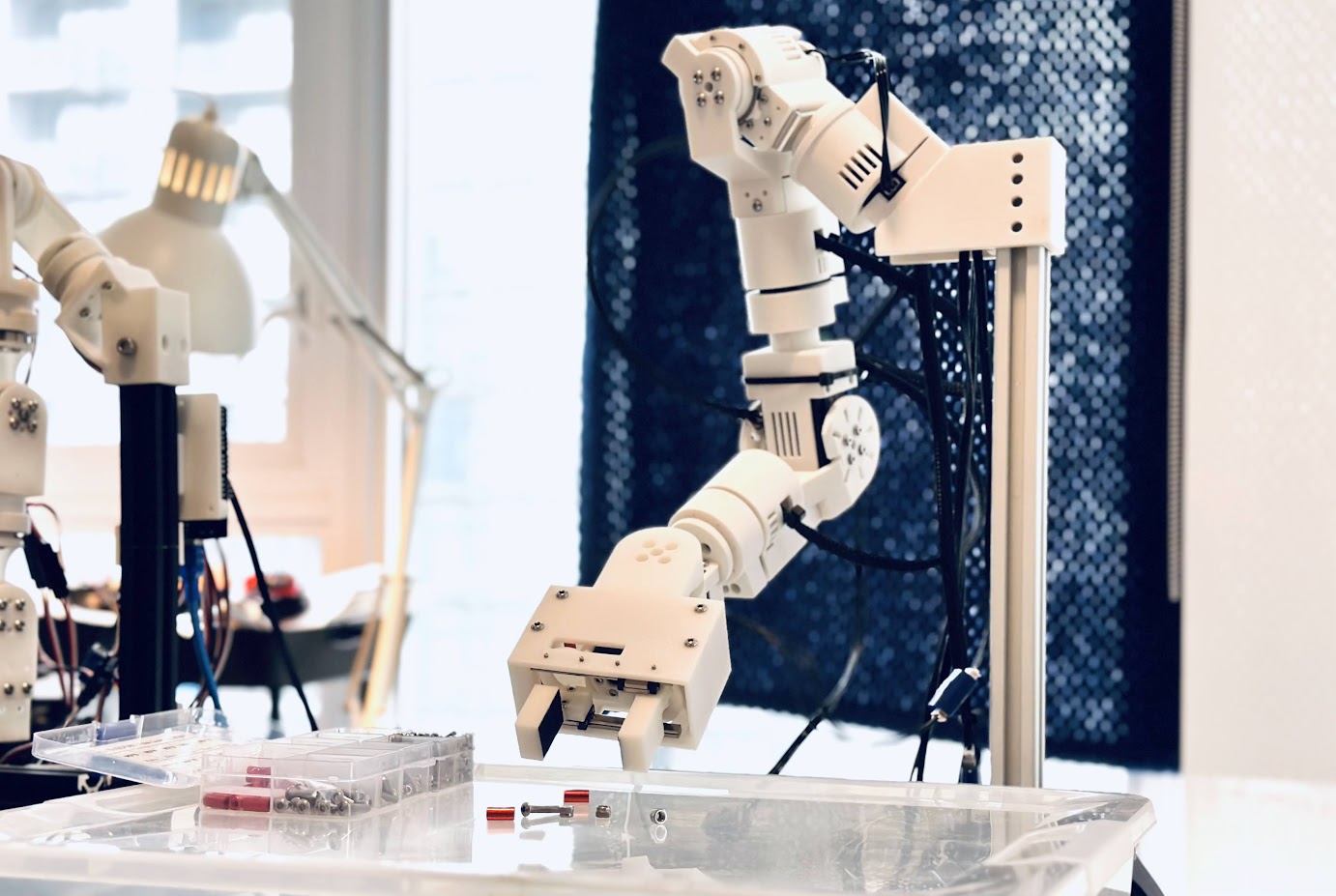
HRC (Human Robot Collaboration) Model 4 is a 6-DOF robotic arm equipped with a depth camera, a force-feedback-enabled gripper and a teleoperated system designed for precision tasks including picking up small objects and engaging in nuanced activities like playing Jenga.
Hardware
Arm
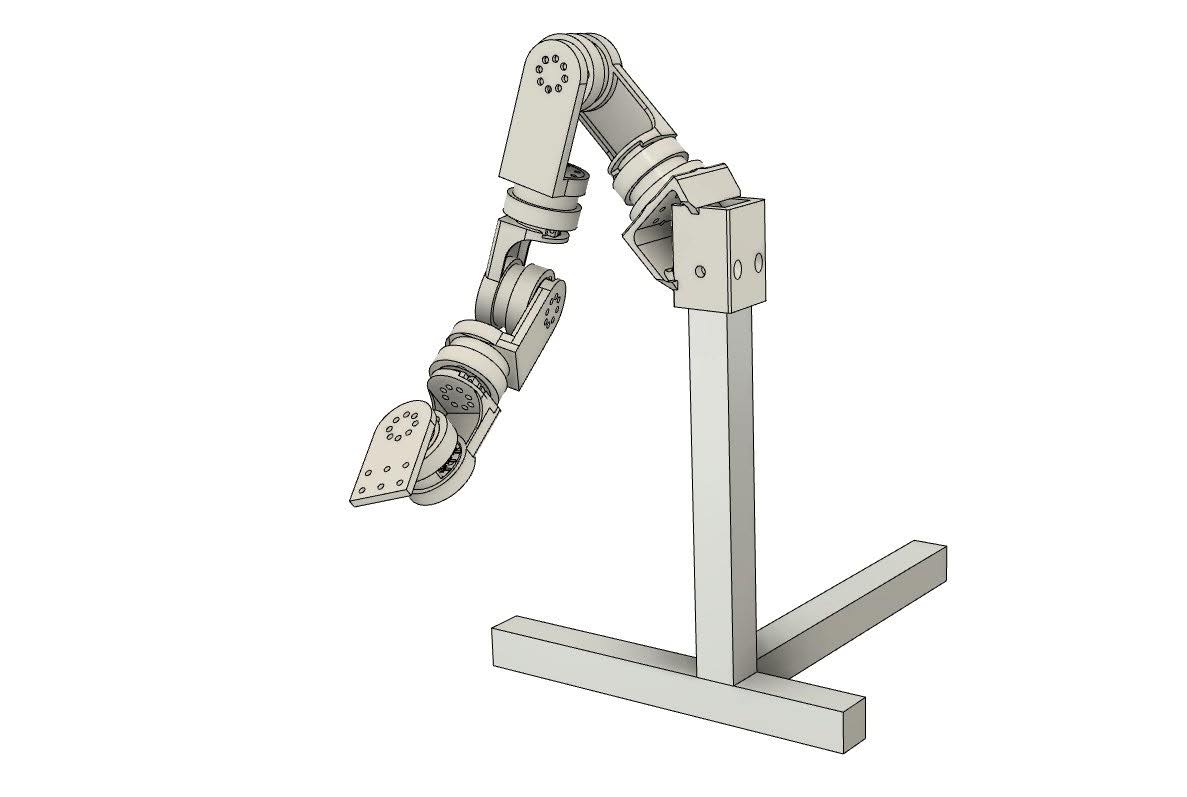
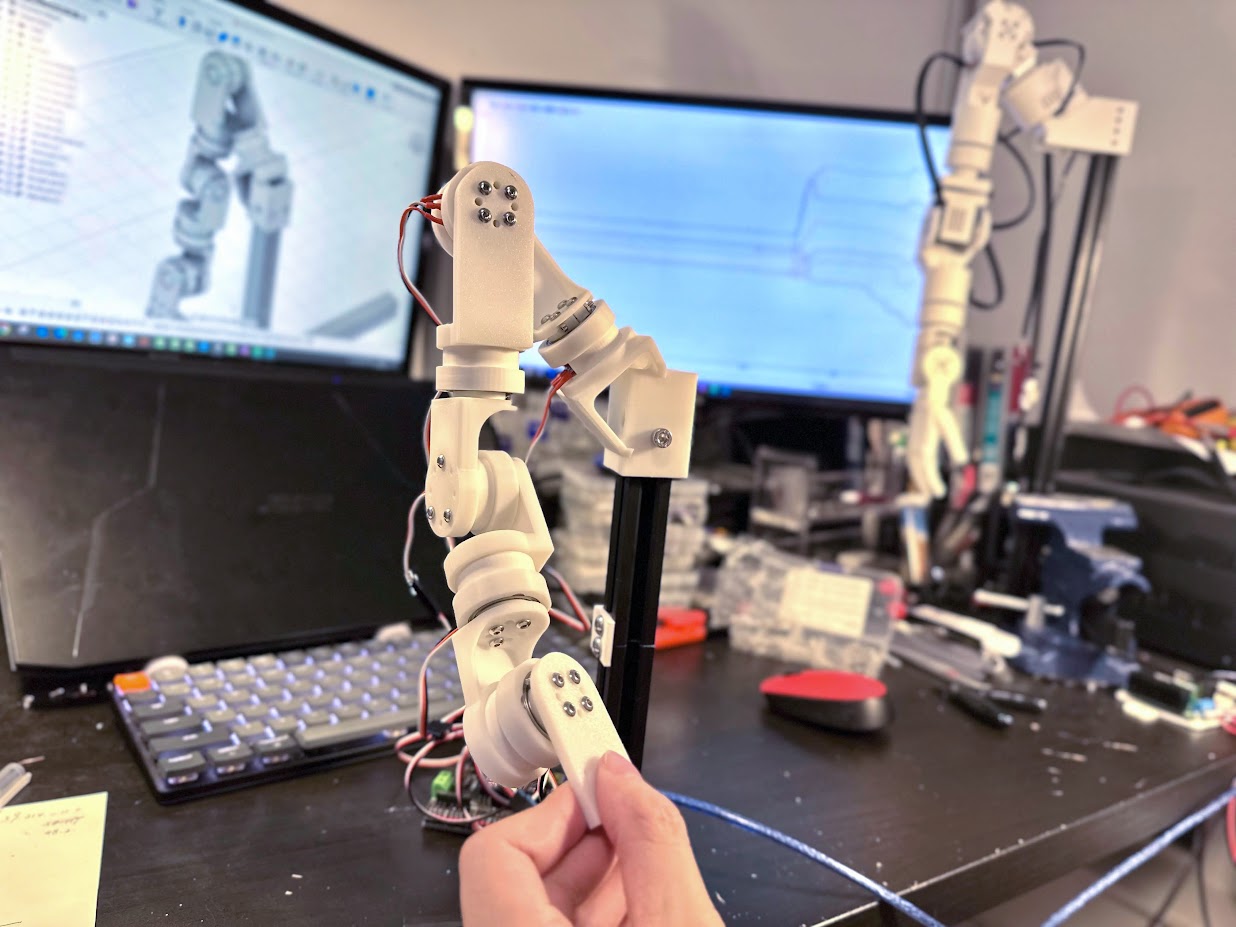
The arm is made with 6 serial bus servo motors, 3D printed parts and some bearings.

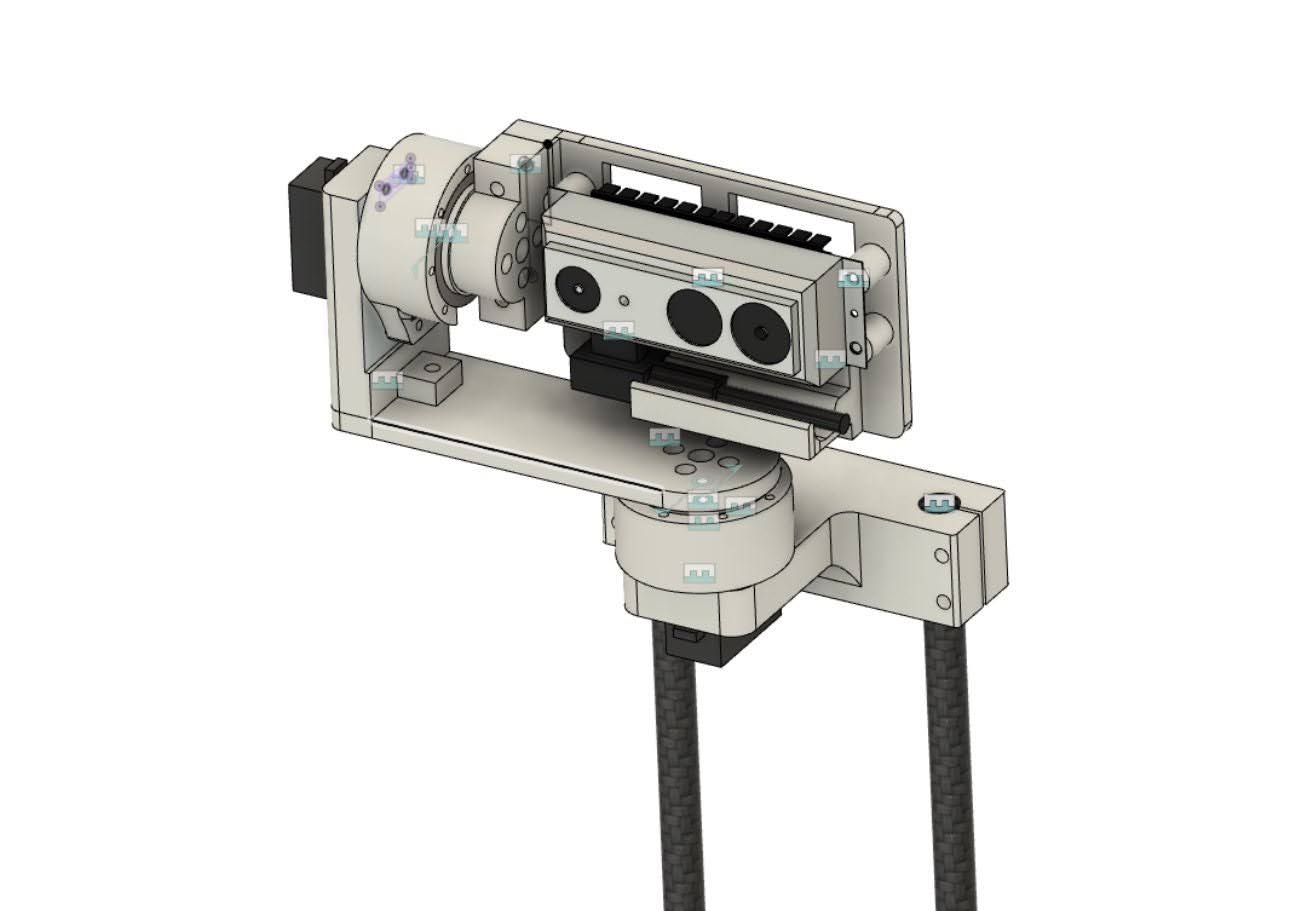
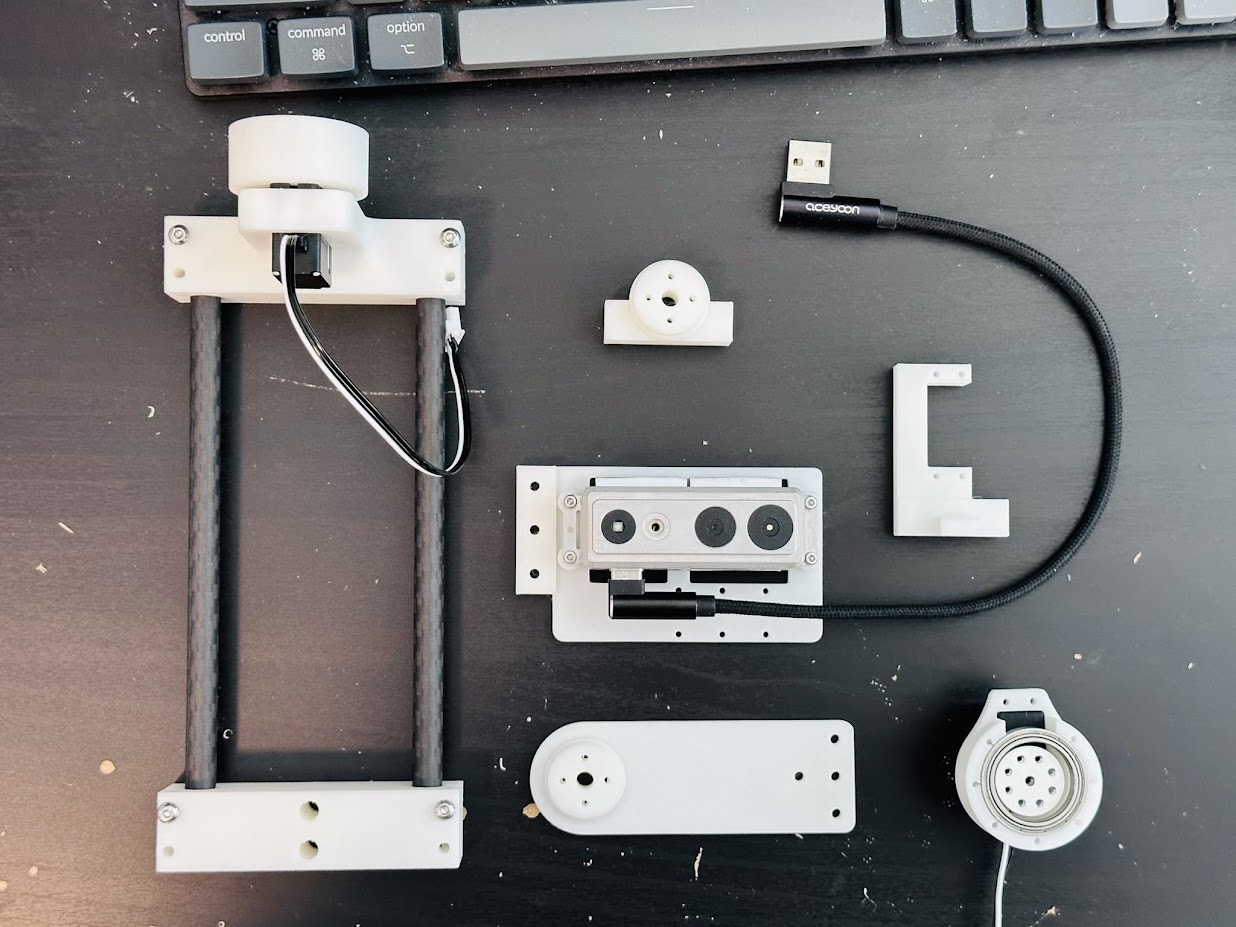
Head
One Astra-embedded-S depth camera and a 2-DOF pan-tilt neck.
End effector
A 6-DOF dexterous hand was designed and built. It uses 3D printed elastic TPU parts and fishing wire for activating each finger.
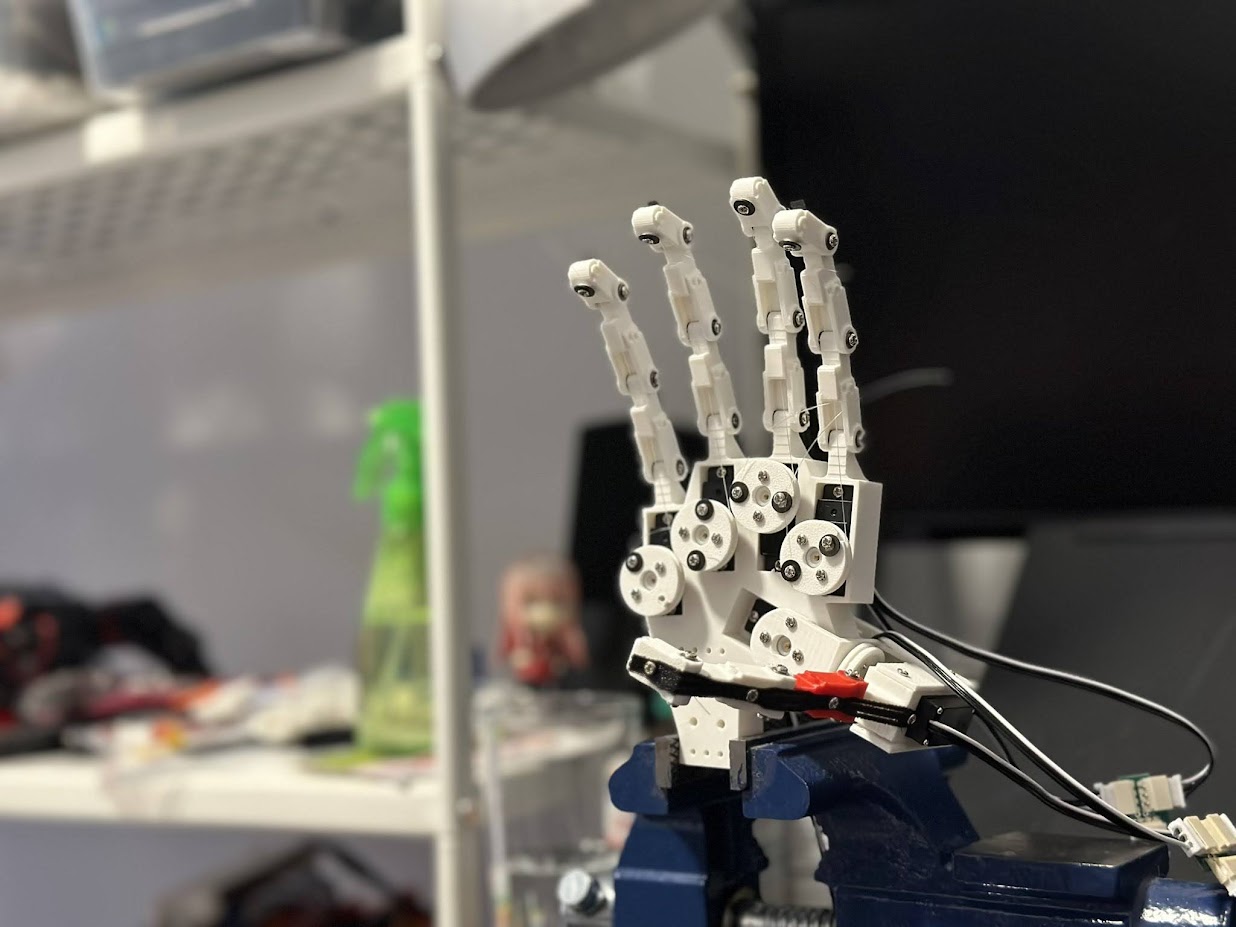
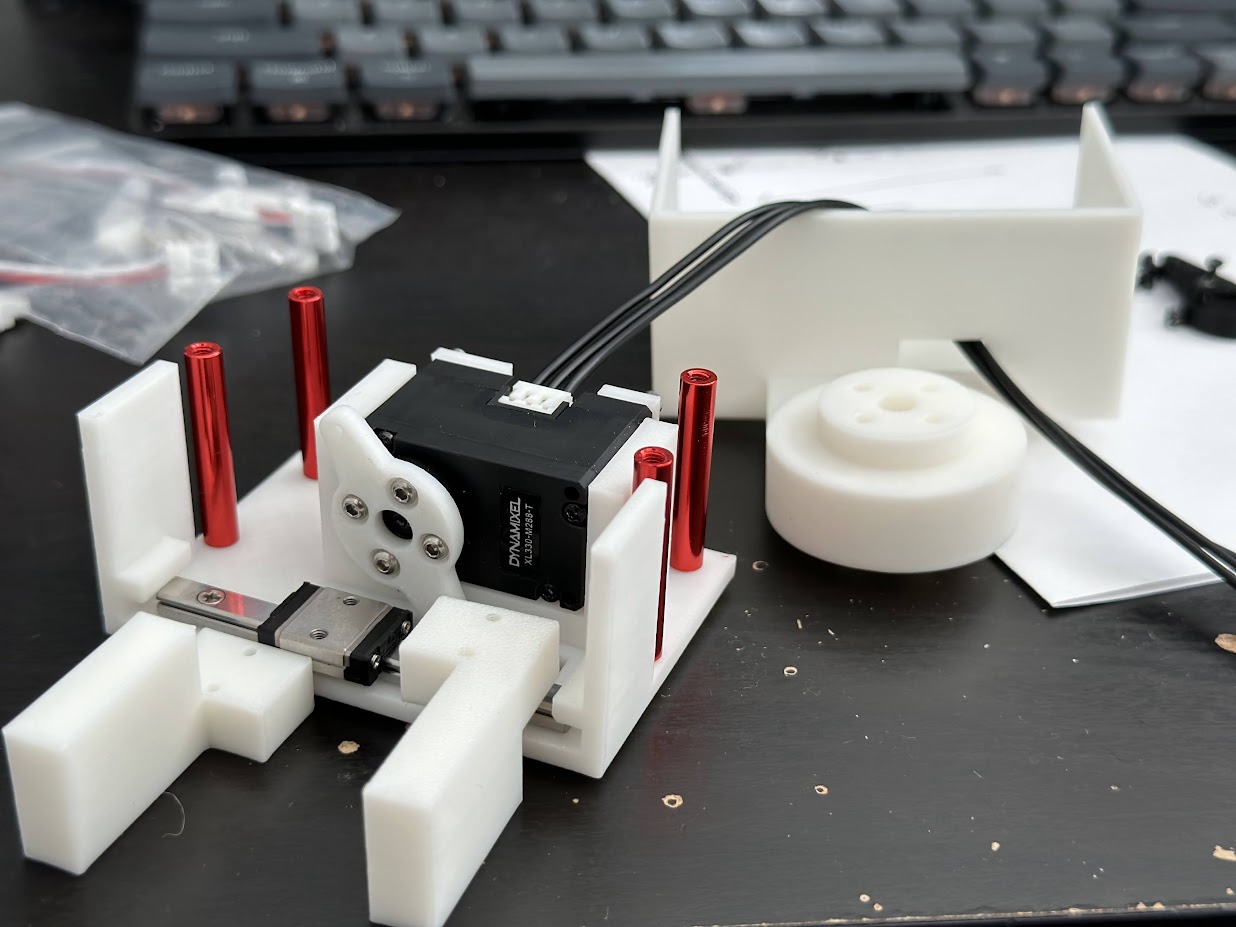
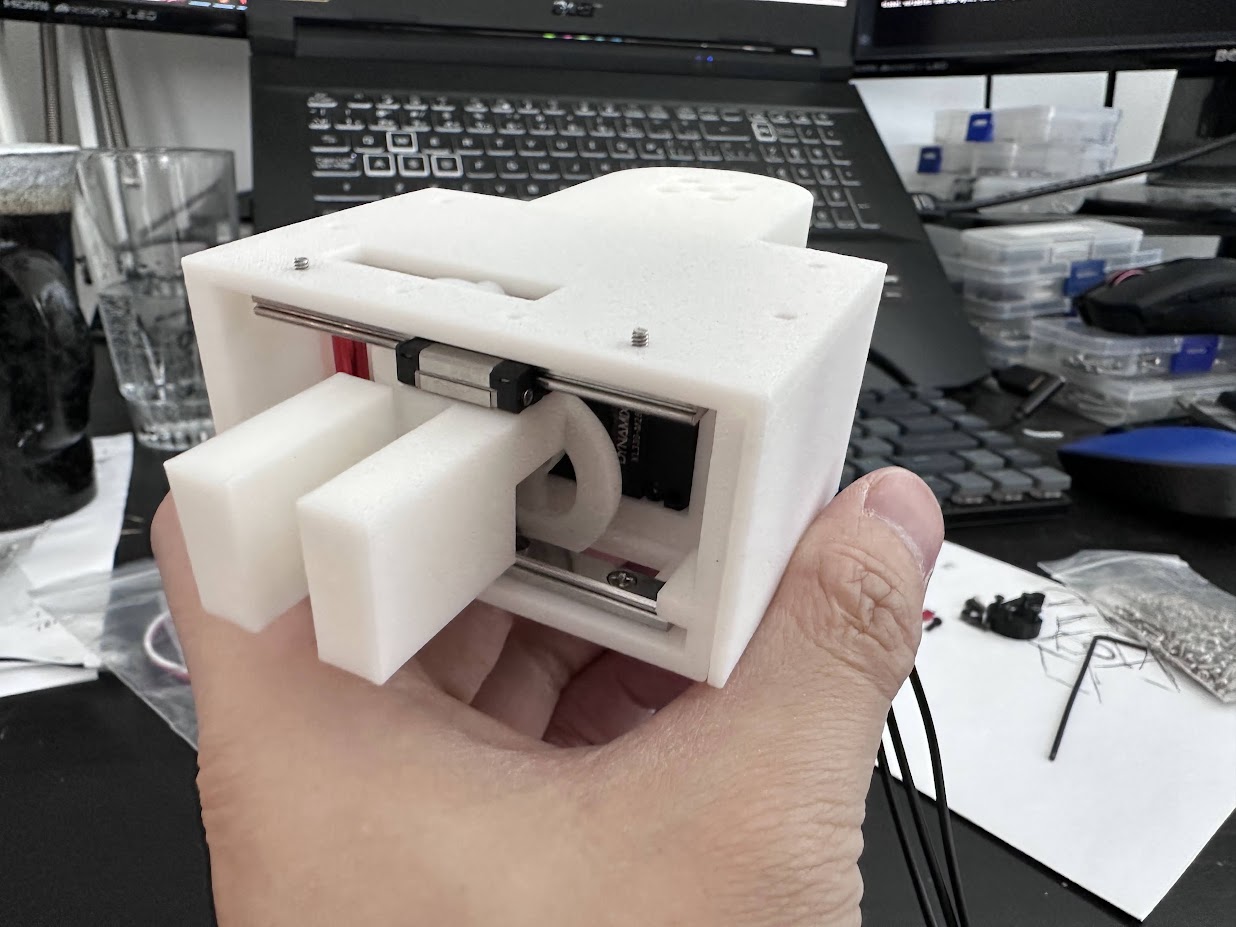
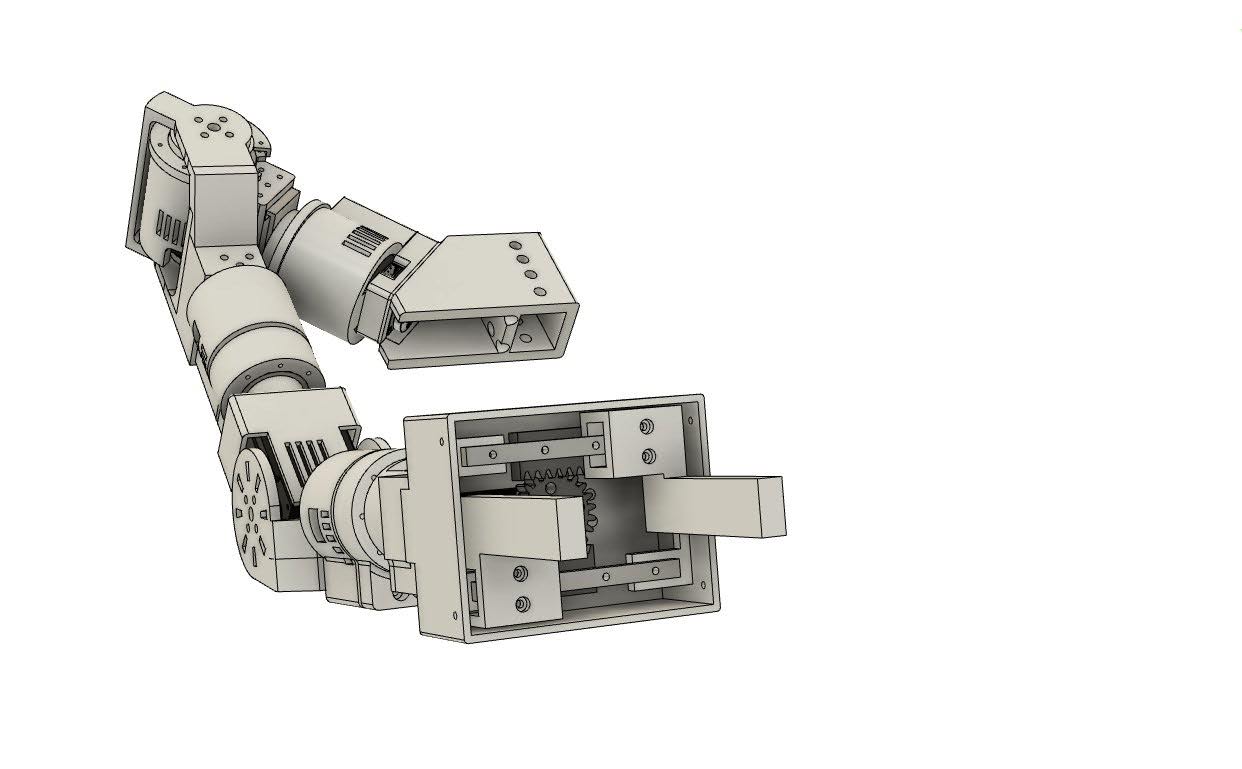
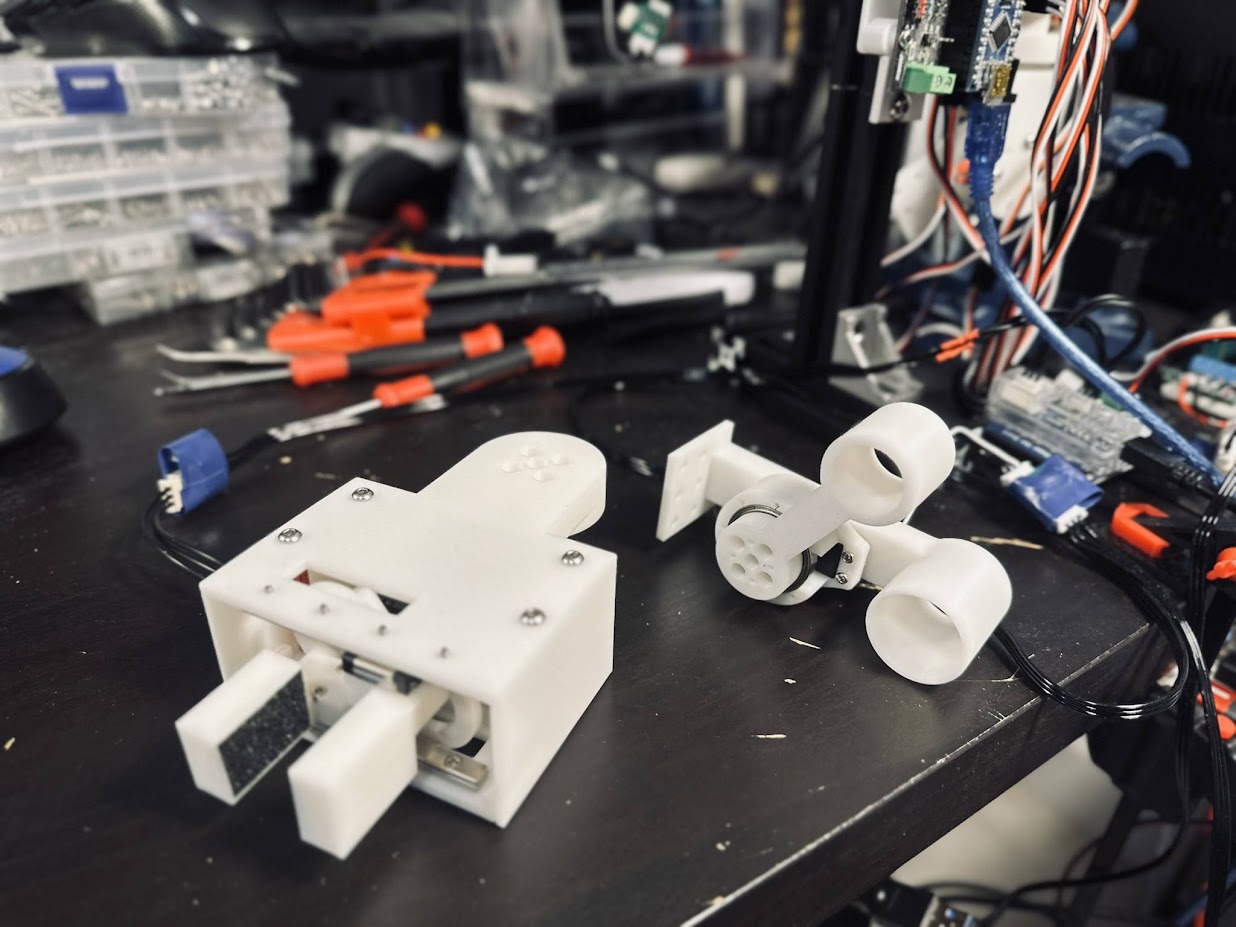
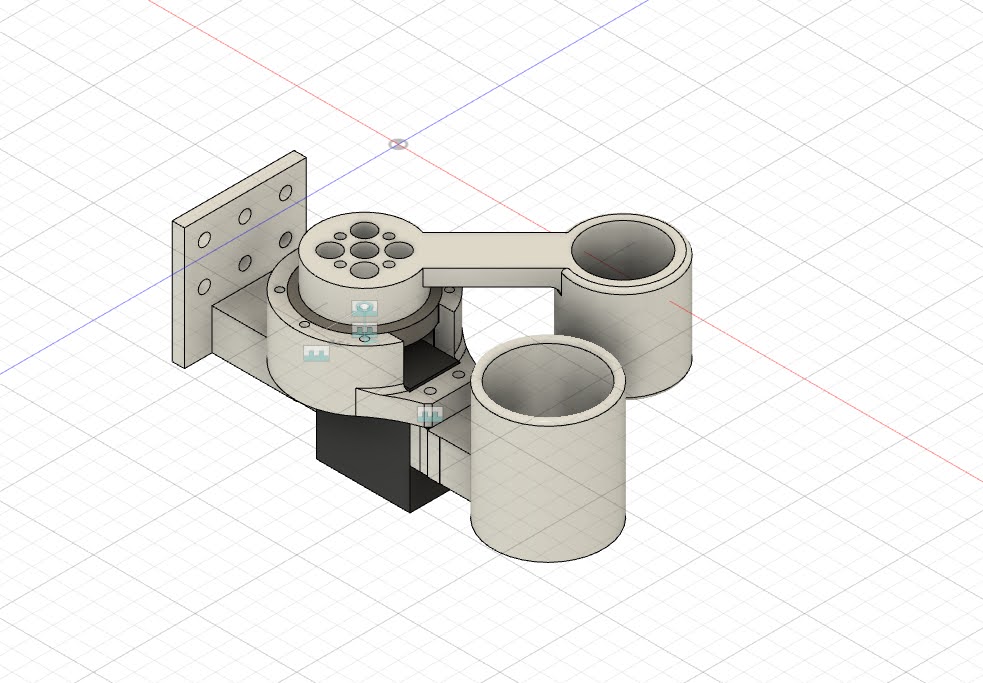
However, the dexterous hand was too hard to contorl and it’s too bulky for the size of the arm. Thus, a smaller 1-DOF gripper was built with 2 sliding rails and a Dynamixel servo motor with torque feedback.
Arm controller
The arm controller consists of 6 potentiometers that are mounted 3D printed chassis. Their analog outputs are read by an Arduino Nano and sent back to the PC through a serial bus.
End effector controller
Software
The current software architecture is set up as following.
- Note that the all motors are controlled in joint space and thus there is no requirement for any kinematics caculation for teleoperation at this stage. In the future, a perception node and a trajectory planning node can be added for automated operations.
- Also note that all servo motors have built-in microprocessors and motor drivers that are capable of producing smooth motions as long as the acceleration values are set low enough as observed from experiments. Thus no extra motion control is needed in this design for now.

Videos
Playing Jenga:
Teleoperation with dummy hand:
Teleoperation with gripper:
Picking up small objects:
Picking up eggs:
codemore code
~~~~