Introduction
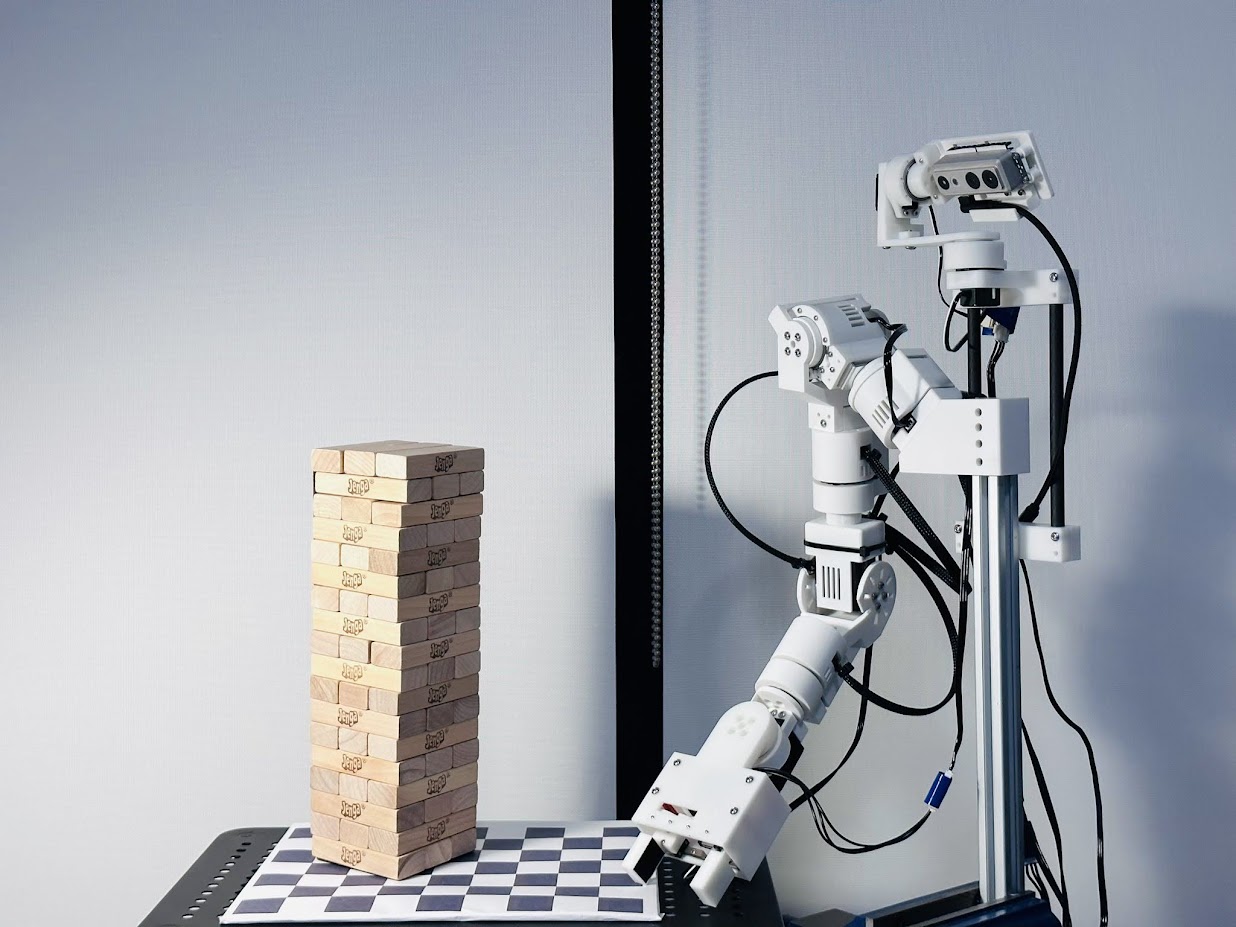
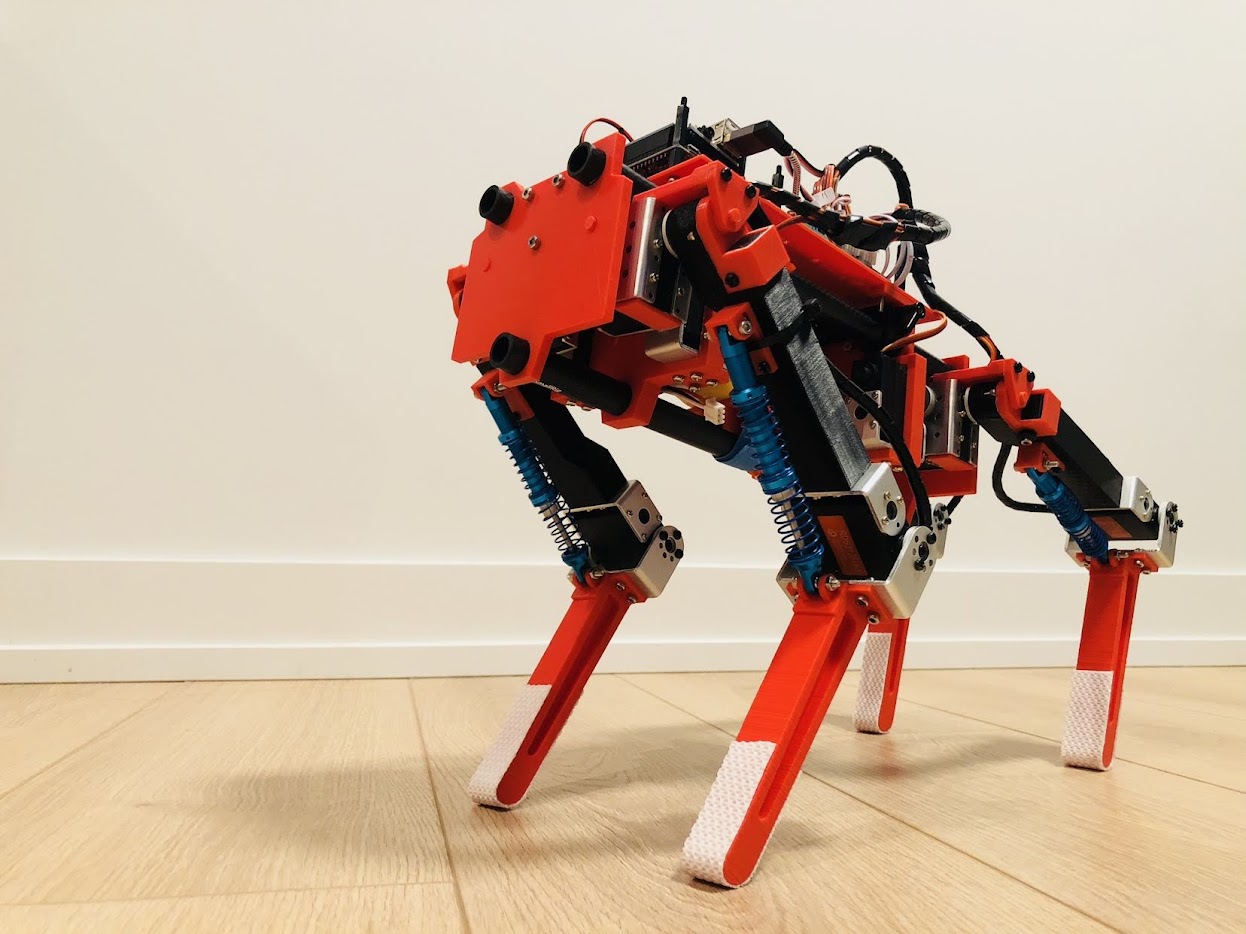
HRC (Human Robot Collaboration) Model 4 is a 6-DOF robotic arm equipped with a depth camera, a force-feedback-enabled gripper and a teleoperated system designed for precision tasks including picking up small objects and engaging in nuanced activities like playing Jenga.