Introduction
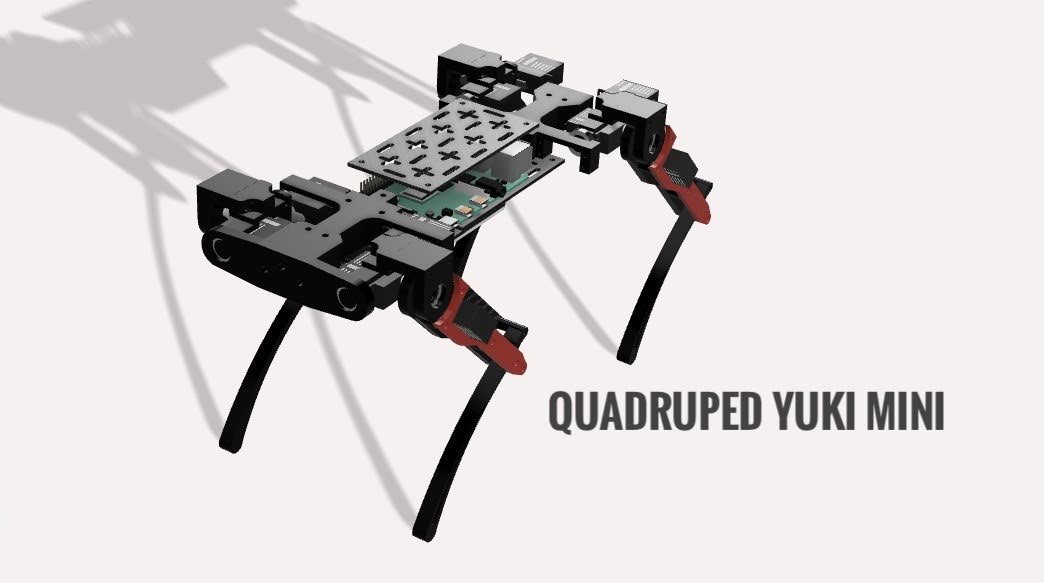
Yuki Mini is a 12 DOF quadruped robot. It is controlled with a Raspberry Pi, an IMU, and off-the-shelf 9g-level servo motors. And it uses ROS in its software. It can jump, run (as fast as 1m/s), climb over obstacles, and move in omni-directions.

Hardware design
Leg
A 3DOF leg with two bearings. The shank servo is placed close to the shoulder to reduce the overall inertia of the leg that enhances dynamic capabilities.

Hardware
I iterated 2 versions of hardware, and the version 2 has better and more proper shell than version 1. The torso and servo arm in the leg is using carbon fiber. Other than that, it is mostly 3D printed.
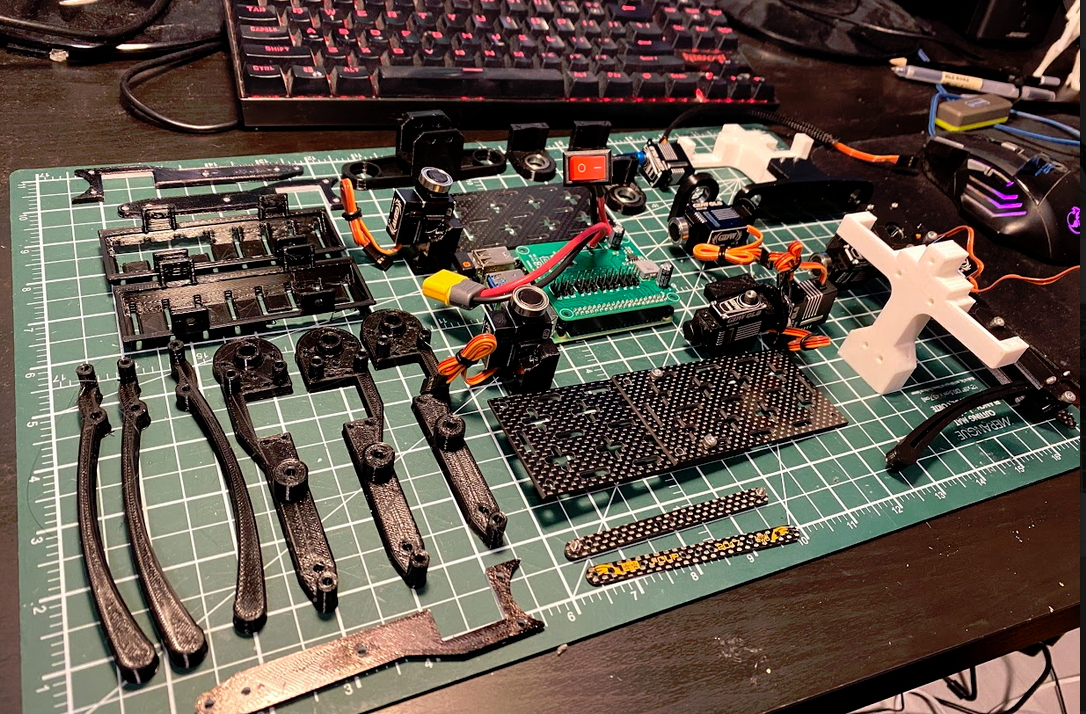
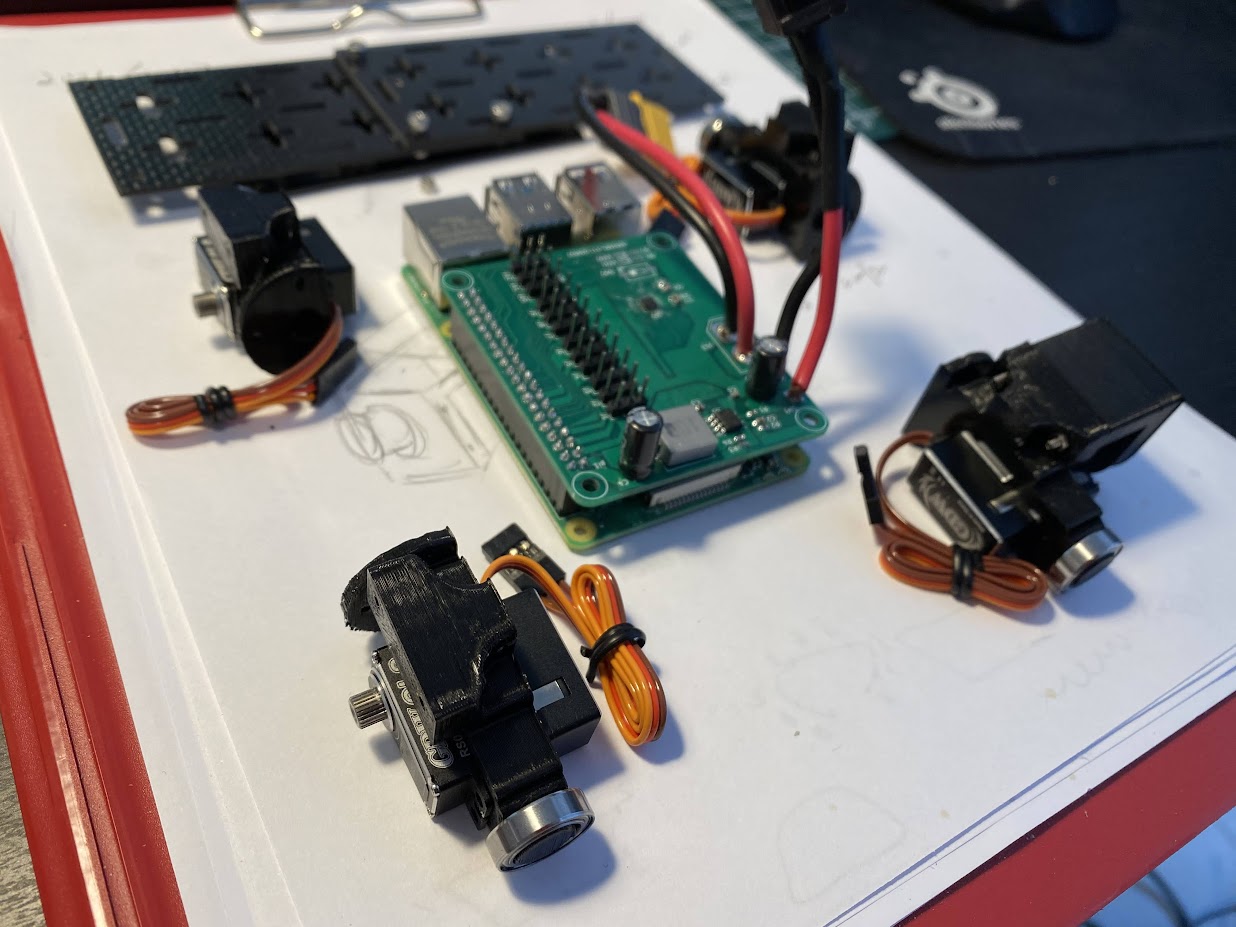
The hat board on top of the Raspberry pi has built-in IMU and power supply circuit.
Version 1:
Version 2:

Software
The software is fully ROS based. It runs very simple inverse kinematics and talks with IMU and servo via GPIO on the Raspbrry Pi that is connected to a hat board that has built in IMU and power supply circuits on it.
Videos
Fast crawl demo:
Omni-direction trotting:
Trotting on obstacle:
Uneven terrain crawling:
Final demo video:
This looks amazing. I would love to build one of these! Is this project OpenHardware or OpenSource? Is there a way to get access to the build files/plans?
– Philippe
Hi Philippe, check it out here https://gallery.autodesk.com/projects/160502/quadruped-yuki-mini