Introduction
A ROS-enabled heavy-load quadruped robot built with strong RDS 3135 servo motor. A simple python library is introduced for multiple servo motor control with no position feedback. This is an up-graded version of Quadruped 9G that I built one year ago.


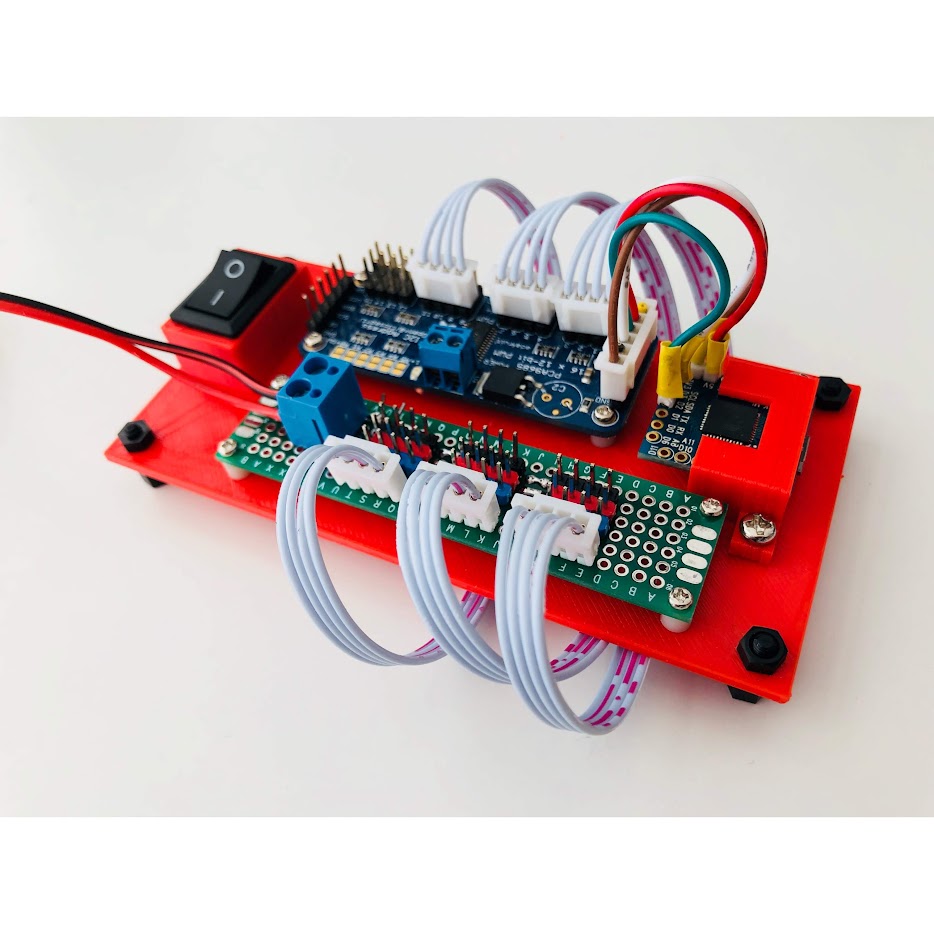
Servo Motor Driver
A customized servo motor driver board is built based on the description in one of my earlier posts . An Arduino Pro Micro converts the serial command coming from the PC and sends signal to the PCA9685 based Adafruit servo motor driver shield via I2C. The power supply on the PCA9685 is not used since it cannot take high voltage and current, instead, a separate board is built for the high-torque servo motor (RDS 3135: 35kg.cm) power supply.
Robot Leg
To reduce the inertia of the leg, the two servo motors for the knee joint and the shoulder joint are mounted at the same height.


Videos
1) Slow move
2) Fast move
3) Kick recovery
4) FPV
Software (TBD)
Mechanical Design
All the 3D printed parts are designed with Fusion 360. Also, 3 carbon fiber tubes are used for the torso of the robot.

Great project! How are you powering the 12 servos?