Introduction
ChiTu II is a ROS-enabled quadruped robot actuated by 12 9g-level metal servo motors. It is an upgraded version of Quadruped ChiTu with servo motors that doubles the torque and adaptive foot 3D-printed with carbon fiber filled nylon. It is equipped with IMU and controlled with Rapberry Pi 4B. It’s software mostly inherits from Quadruped Yuki Mini and Quaduped Tsuki.

Hardware

It’s previous generation, Quadruped ChiTu, suffers from the problem that the servo motors are not powerful enough since their gears are not metal and their circuits can only do 5V and cannot handle 2s batteries. Also, since it lacks a way to obtain the feedback of foot-ground contacts, the shock from the contacts breaks the servos occassionally. To mitigate these problems, there are two major upgrades in this new version:
* The metal servo motor that doubles the torque. To achieve this, the chassis are redesigned and cost triples from $10 per servo to $30 per servo. A downside of this upgrade is that it made the robot heavier.
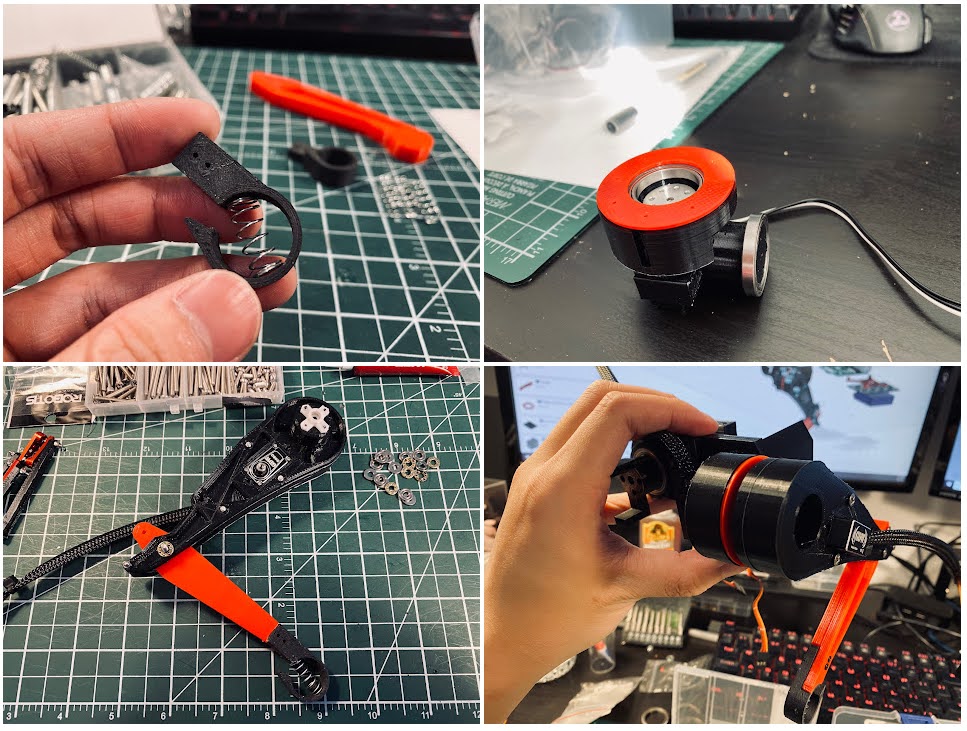
* The adaptive foot 3D-printed with carbon fiber filled nylon. This can hopefully make the foot ground contacting “smoother” without using complicated software solutions. A downside of this is that it tends to make the robot more unstable.
Videos
Here are two demo videos of ChiTuII, you can compare it with the previous generation and see how much improvements it has.
codemore code
~~~~