Introduction
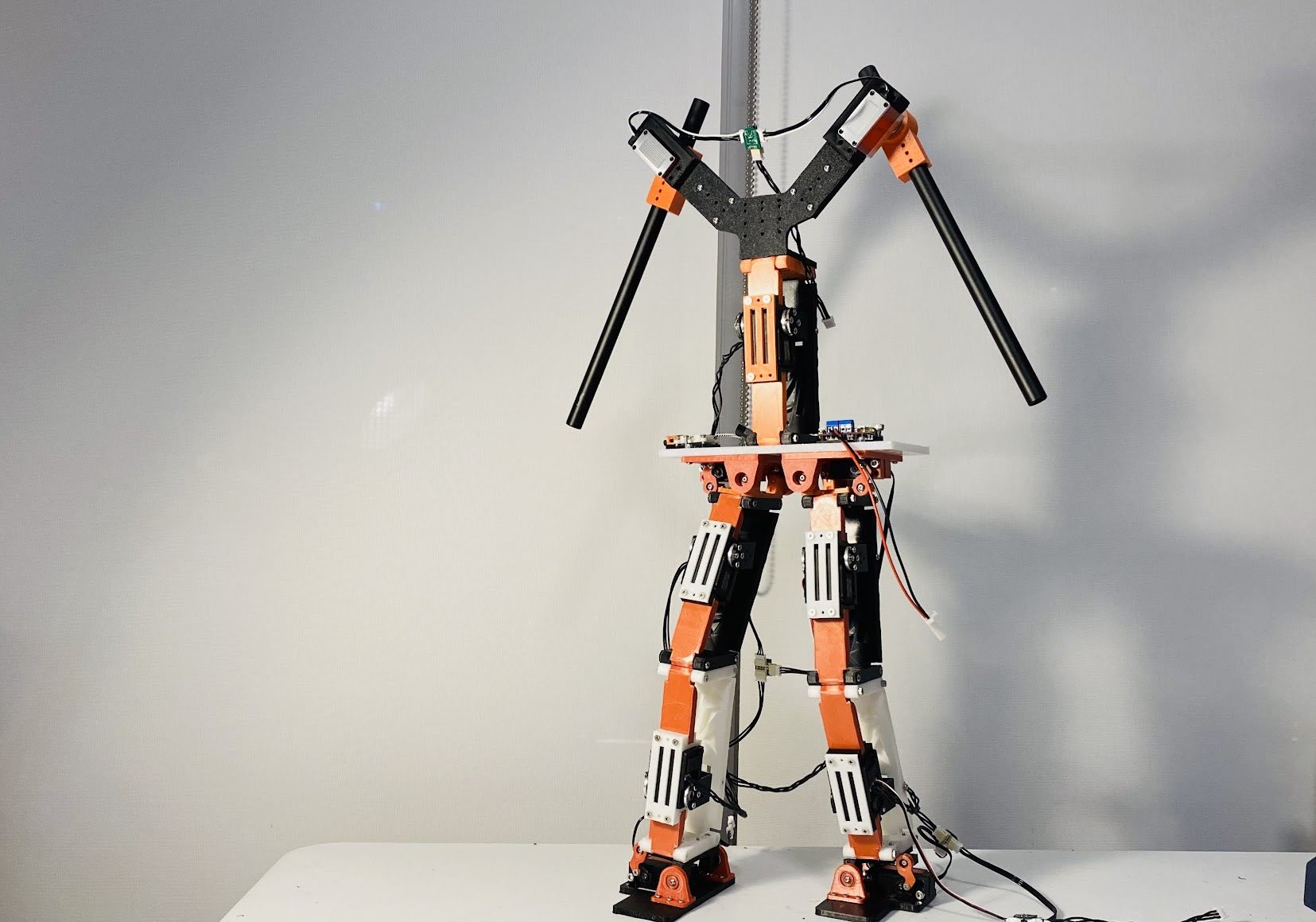
HRC (Human Robot Collaboration) Model 0 is a 1.9-foot, 11-DOF bipedal robot equipped with an Inertial Measurement Unit (IMU) and it achieved self balancing and bipedal walking with a simple yet effective PID based controller.
Hardware
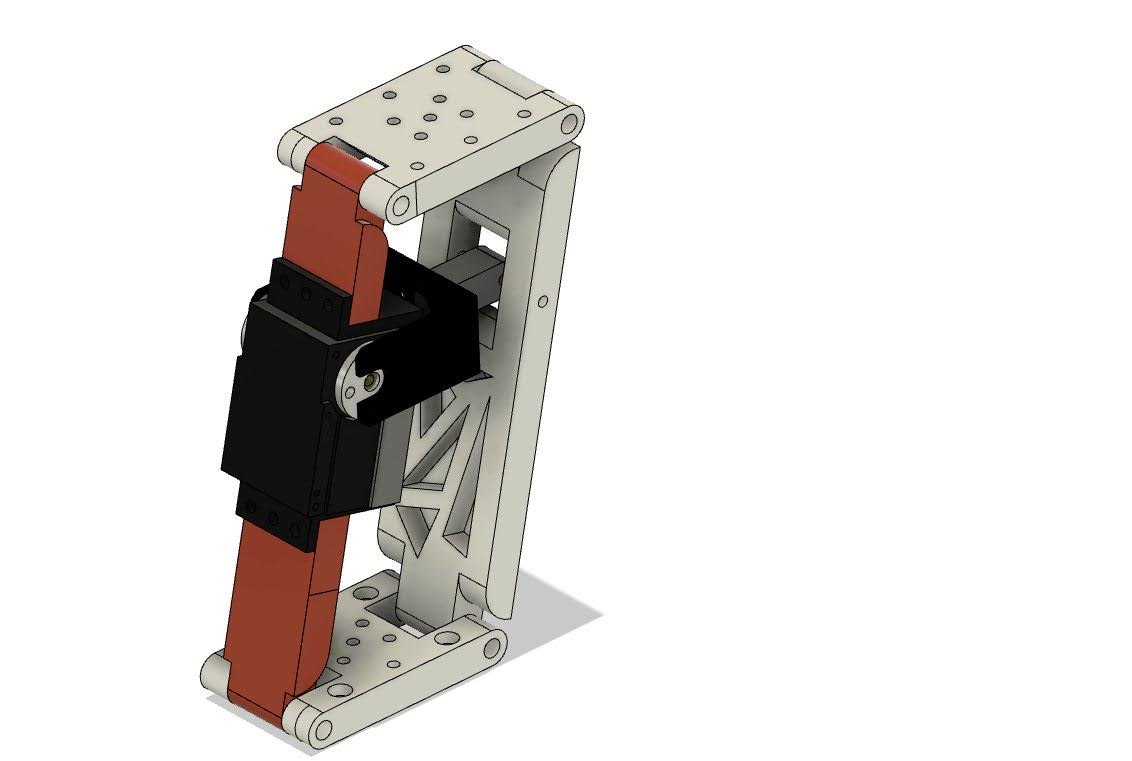
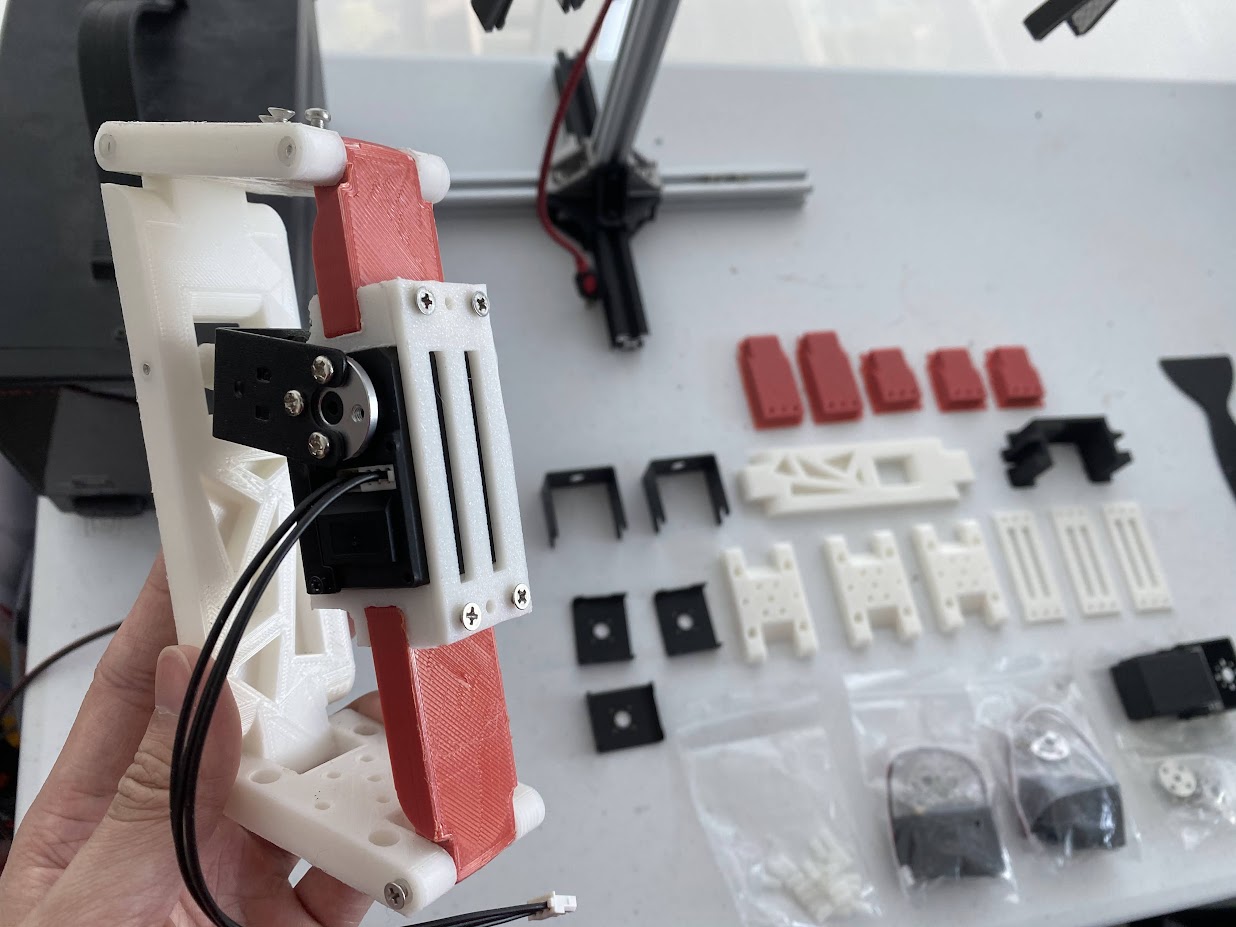
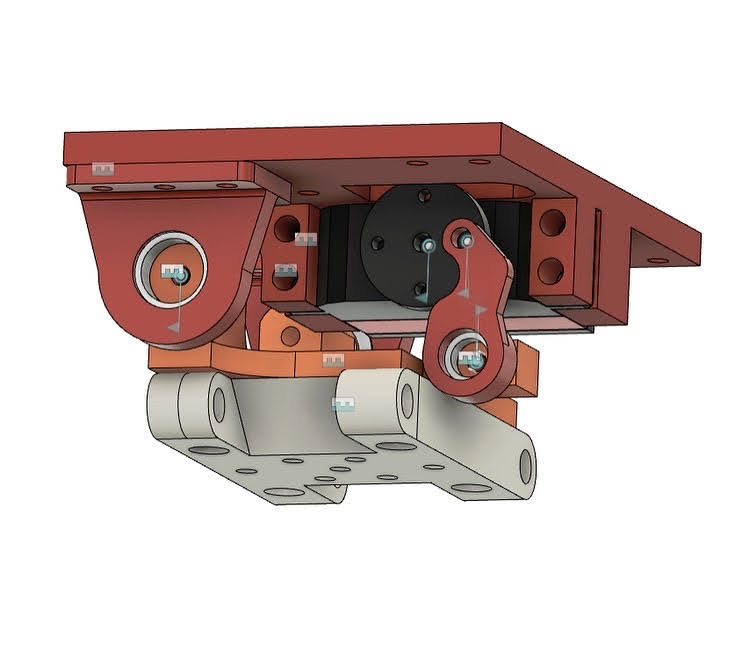
Leg
Each leg contains two identical leg modules. The module is built with a servo motor with modest stall torque (1.5 NM) and a 3D-printed parallel mechanism. This mechanism makes it easy to control (main the body upside) and reduces the torque required at the knee joint.
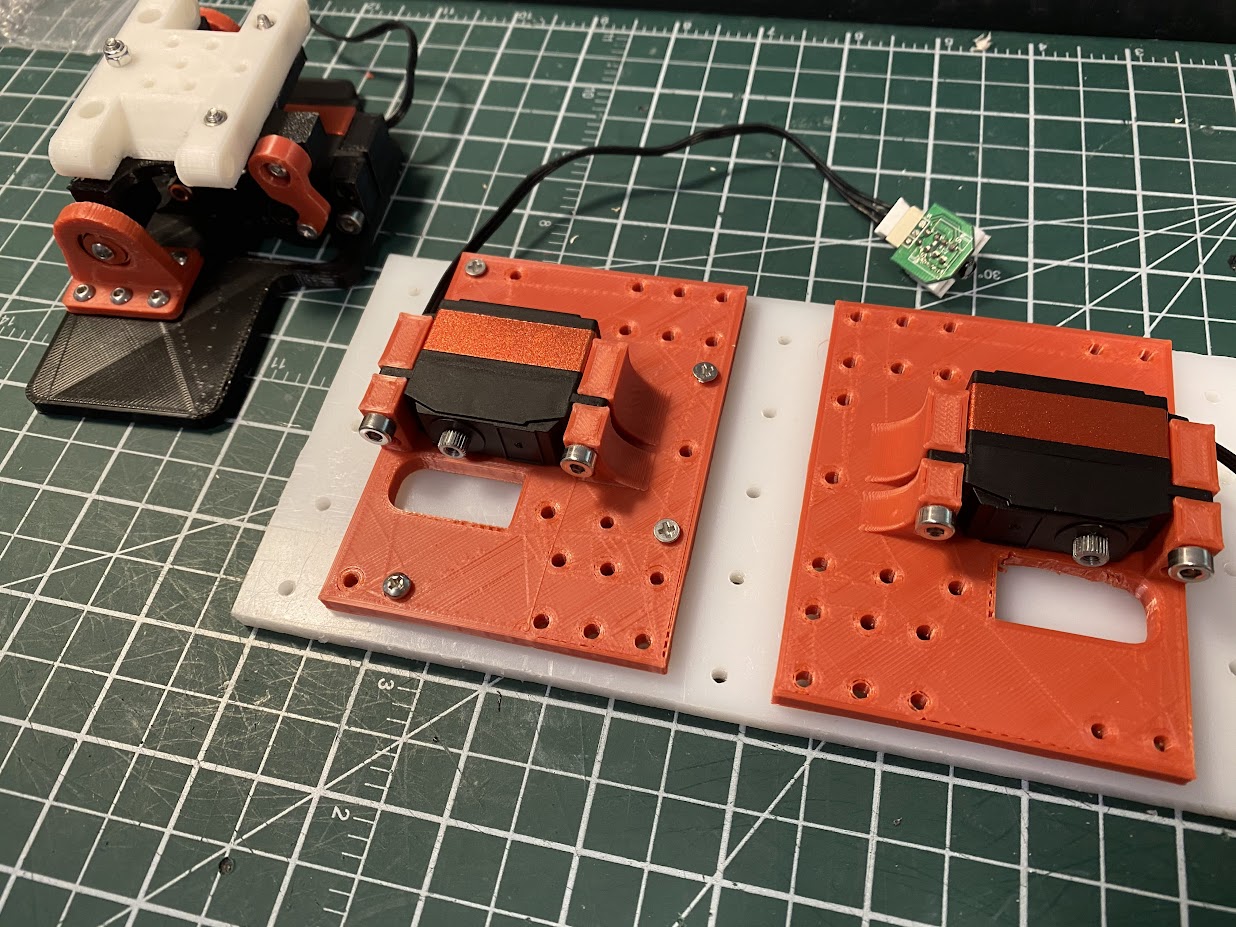
Foot
Each foot is built with a fairly low torque servo motor (stall torque at around 0.6NM). By utilizing the principle of leverage, it can easily lift up the whole robot.
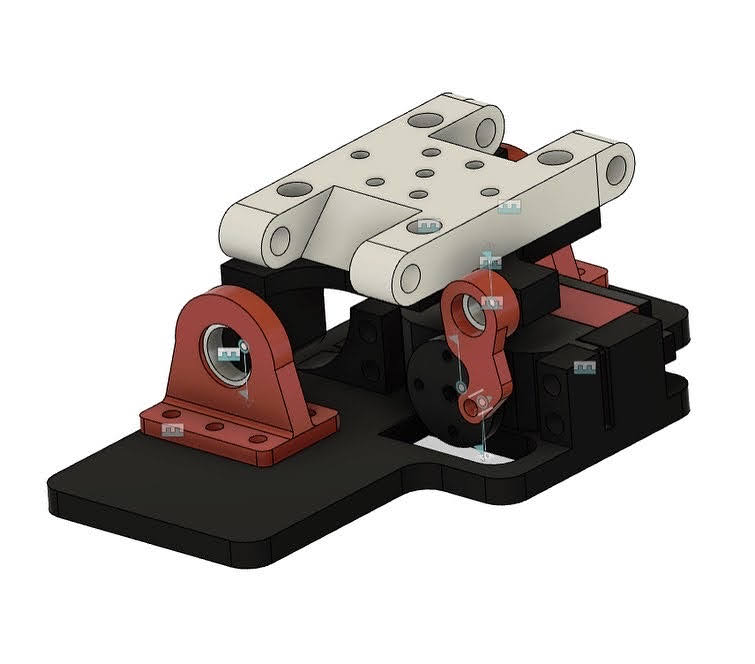

Hip
Each hip joint is built with the same design as the foot module. It can easily shift the robot’s body from left to right with a low torque servo motor.
Upper body
Originally a high-degree of freedom (12DOF) was designed to perform manipulation tasks, however I wanted to focus on bipedal walking for this project and thus changed the upper body to a simpler 3DOF design.
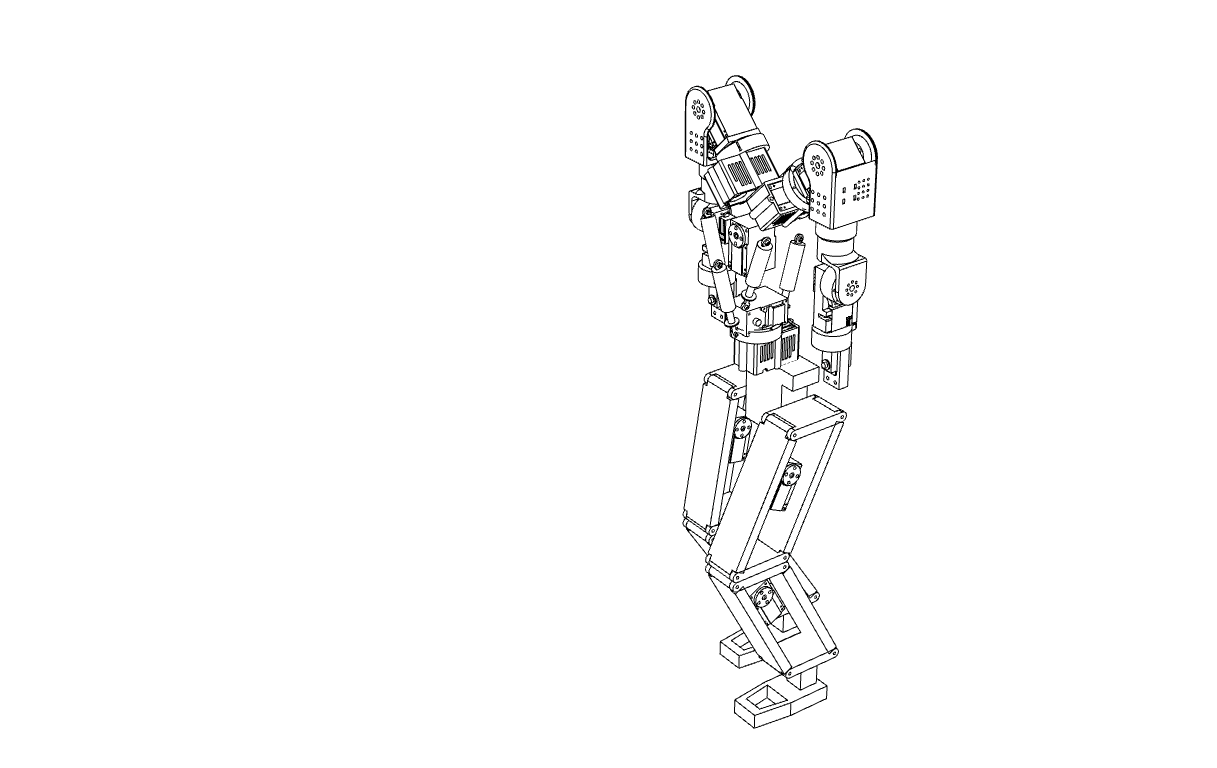
The two arms can swing left and right to help the robot balance as well.


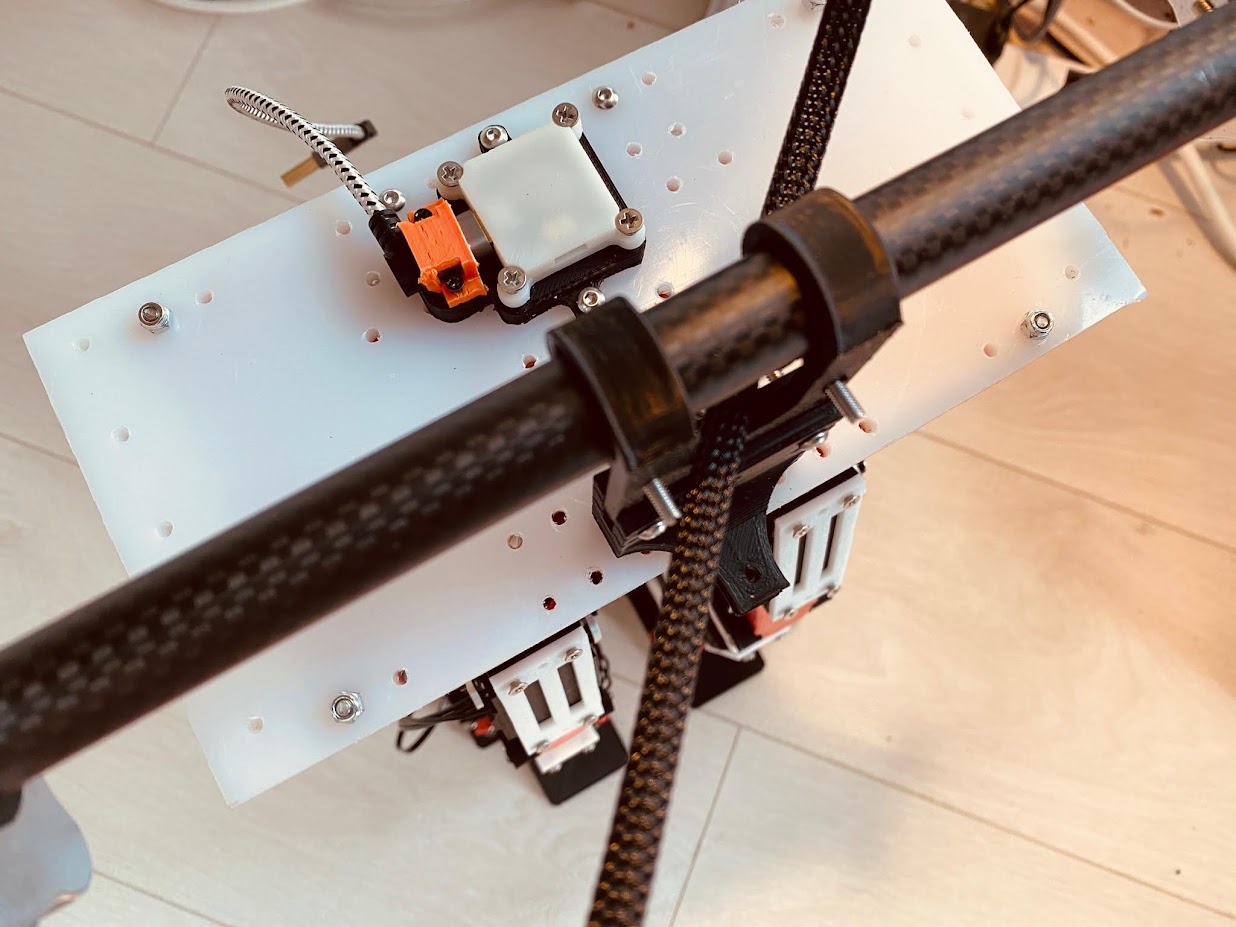
IMU
An IMU is integrated at the center of the robot to measure the tilting angles of the robot to help keep it balance.
Software
The general idea is to:
- lift up and down the legs of the robot using the leg servos to make it step forward and backwards
- while at the same time feed the tilting angle (at roll direction) measured from IMU to feed in a PID controller to shift the body left and right using the hip and foot servos.
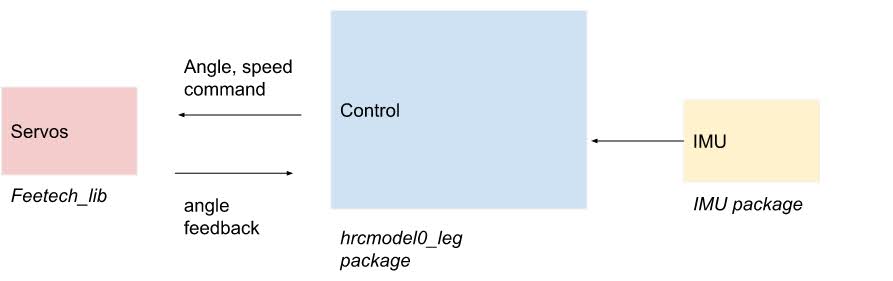
The high level architecture of the system is as following:
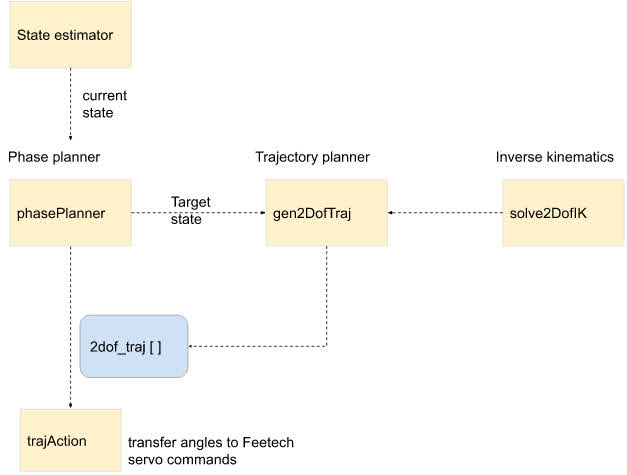
More details on the software side:
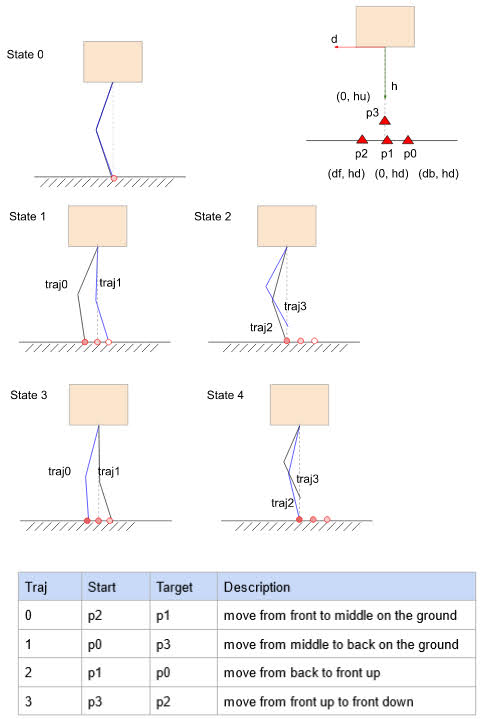
Here is a simplified diagram of the 4 different types of trajectories generated during a typical walking (forward) loop:
Videos
Walking
Balancing
Conclusion
- Relatively smooth bipedal walking motion was generated uitilizing “parallel module” based leg design and a fairly simple PID based balancing controller.
- The overall cost of the project is under $200, which is impressive for getting a kid-size bipedal robot to walk.
- There are limitations in this project for example the robot is can’t turn left/right and can’t handle uneven floor.
codemore code
~~~~