Introduction
A ROS-enabled mini quadruped robot. A brand new design that is a very mini (and low-cost <$100) version of Quadruped Tsuki. It is small enough to be able to walk around on the desktop!
Hardware
Actuators
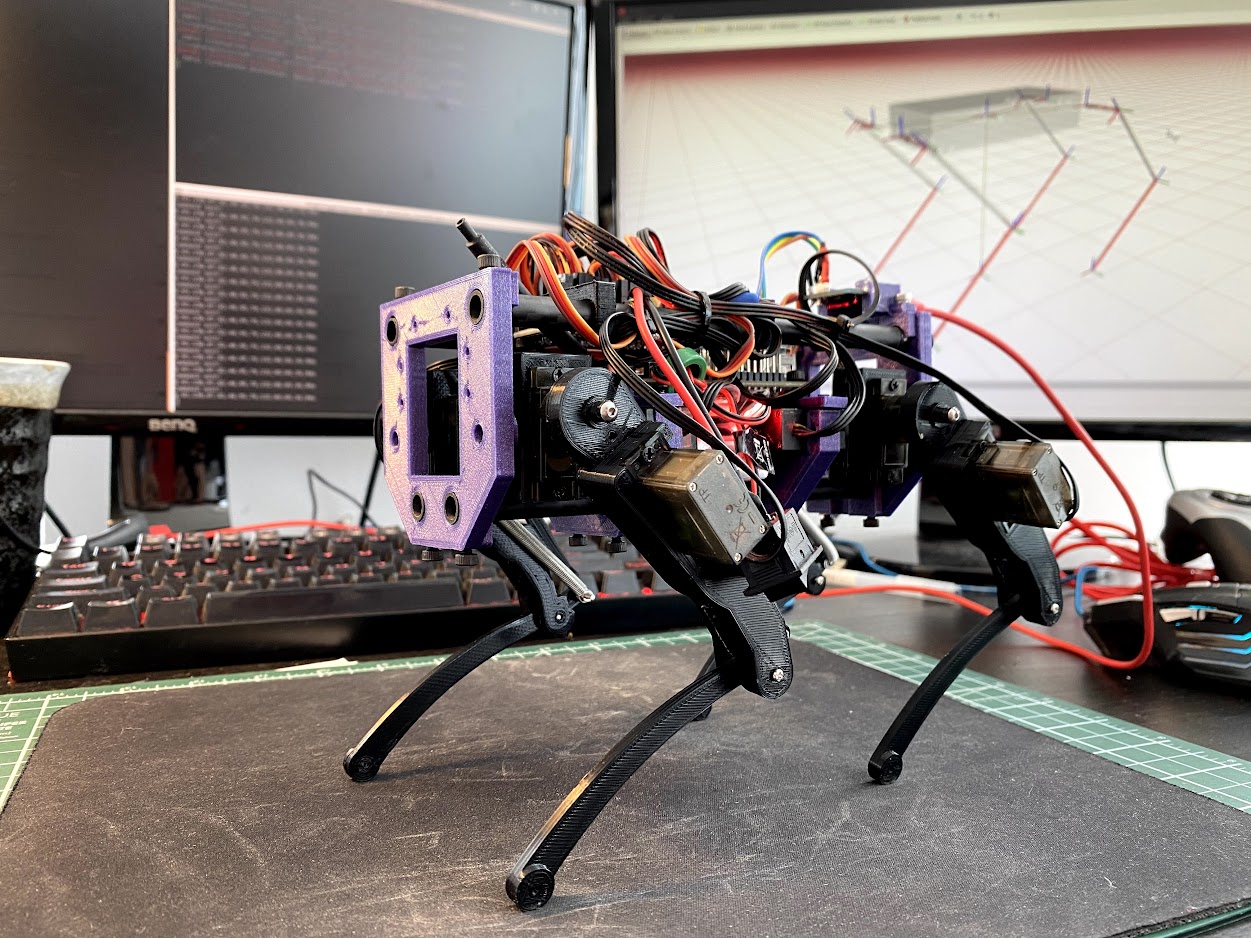
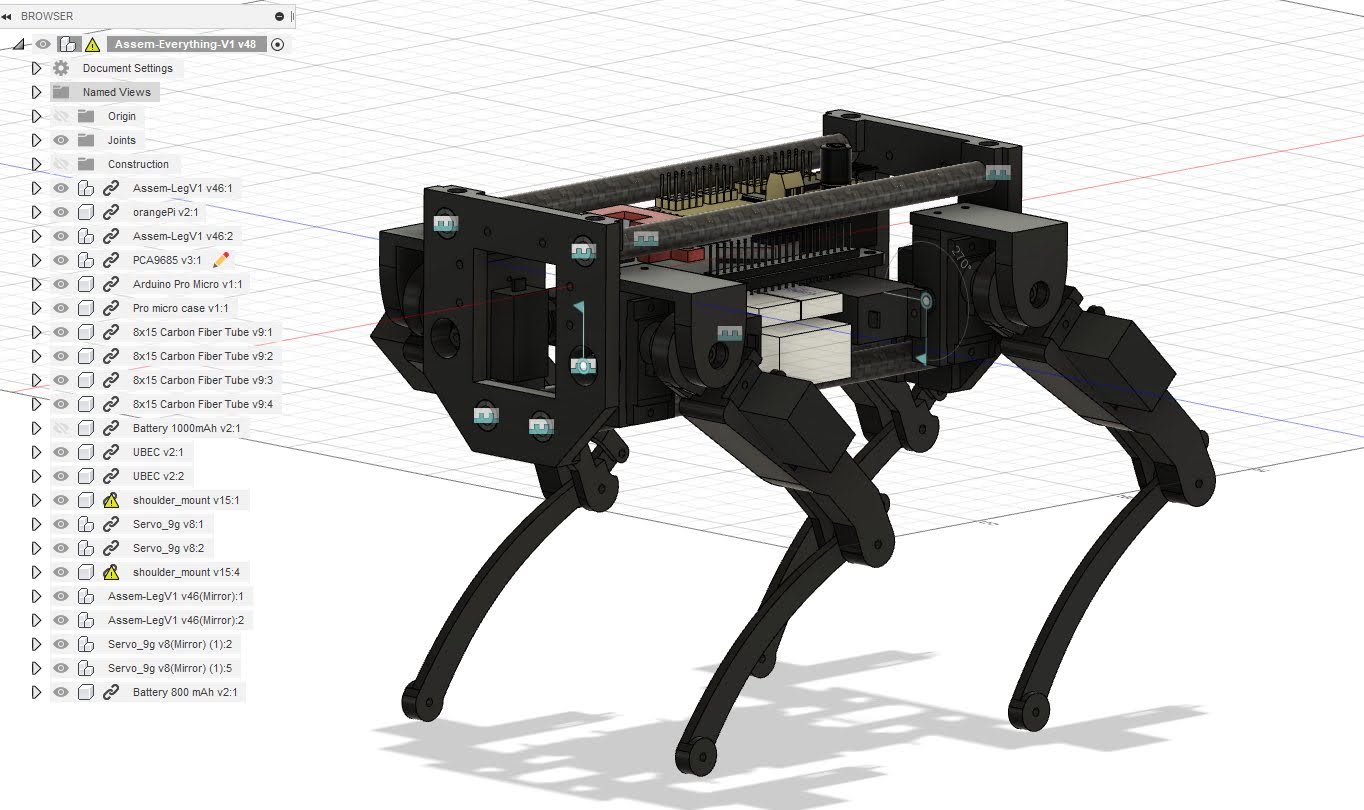
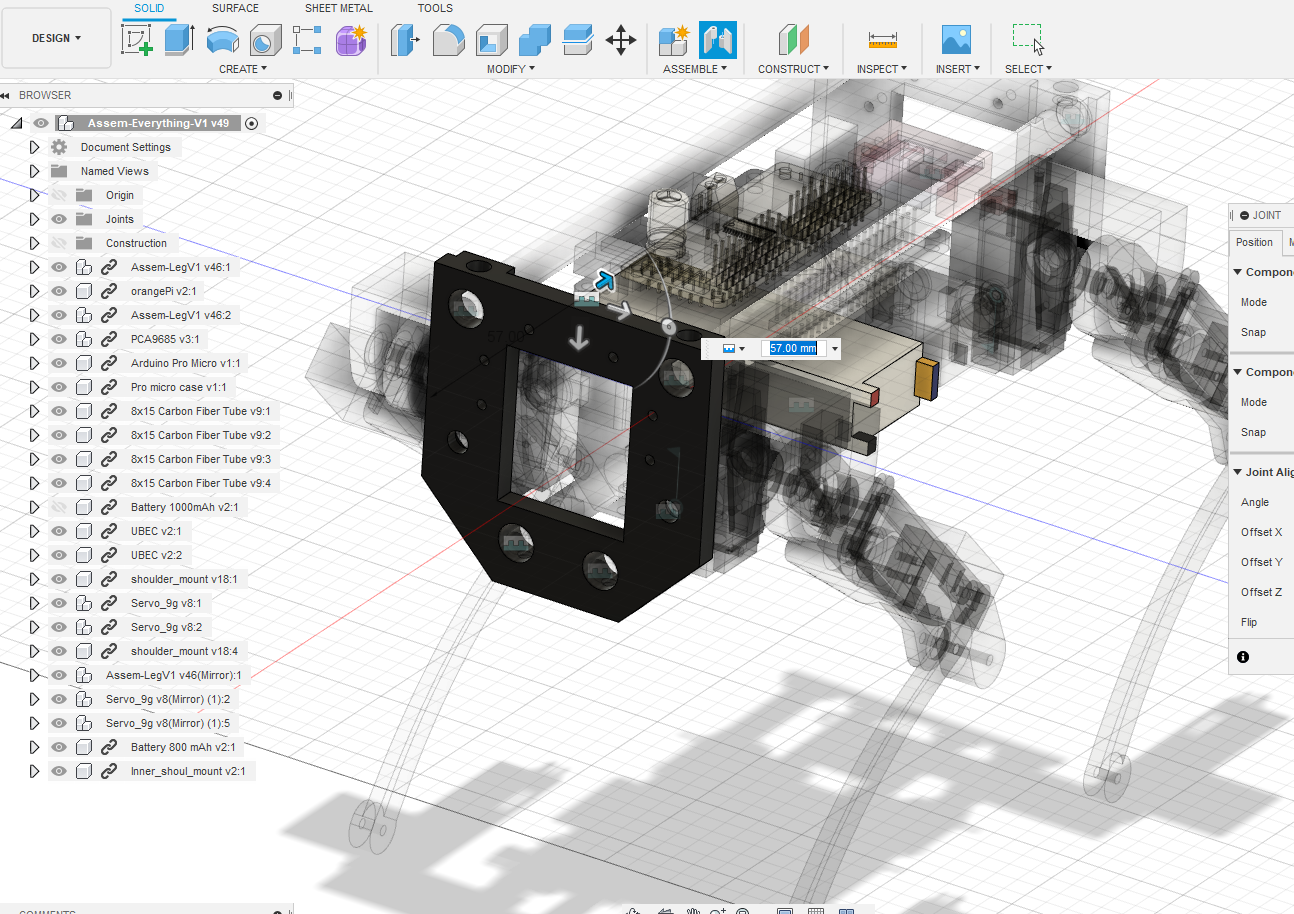
Tsuki Mini was designed using Fusion 360. He has 12 degrees of freedom. 12 MG90S servo motors are used as actuators. The motor driver system is exactly the same as Quadruped Kaze.
The total body length is 17cm, the thigh is 8cm and the shank is 8cm.
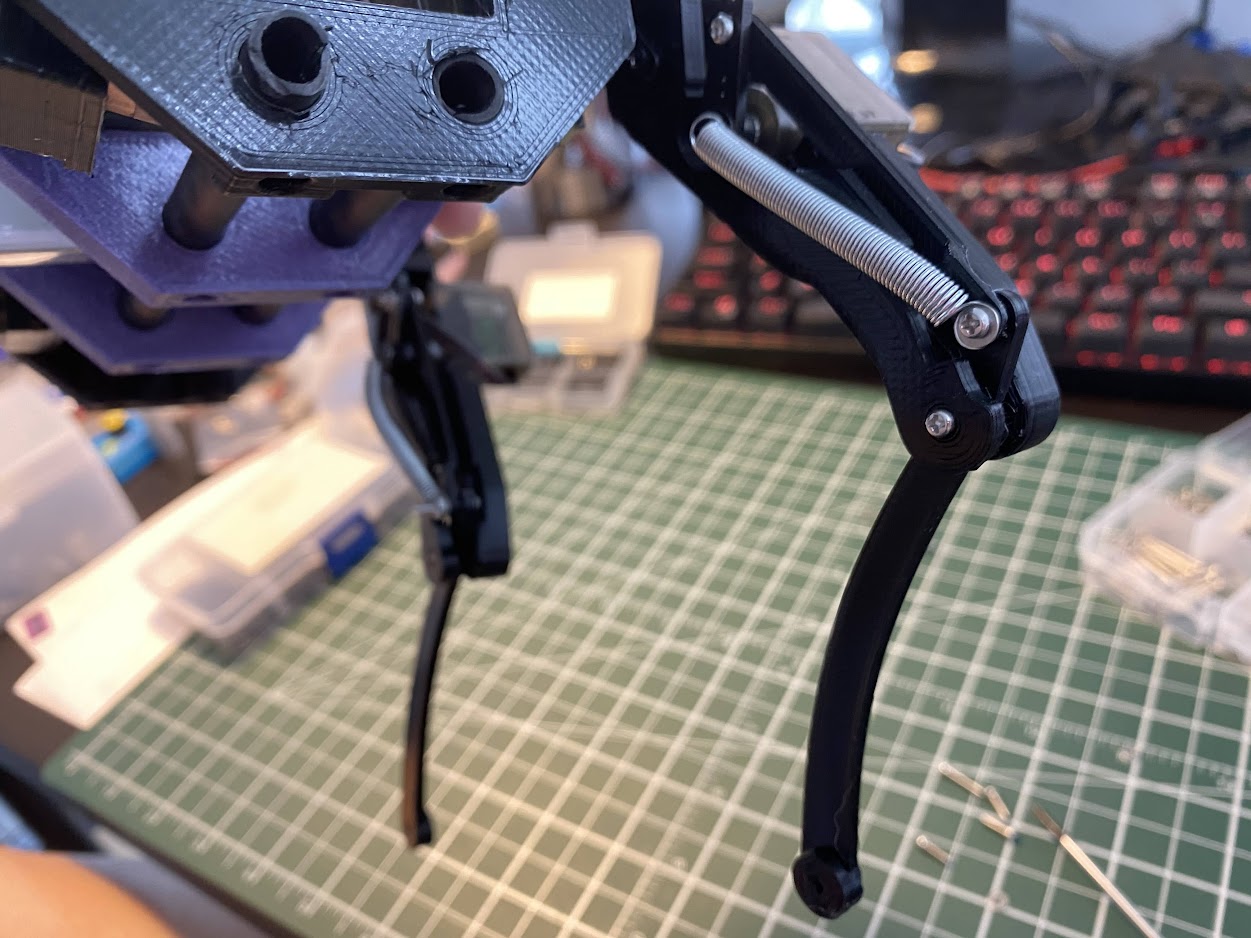
Leg
Springs are added to each legs to reduce the torque required.


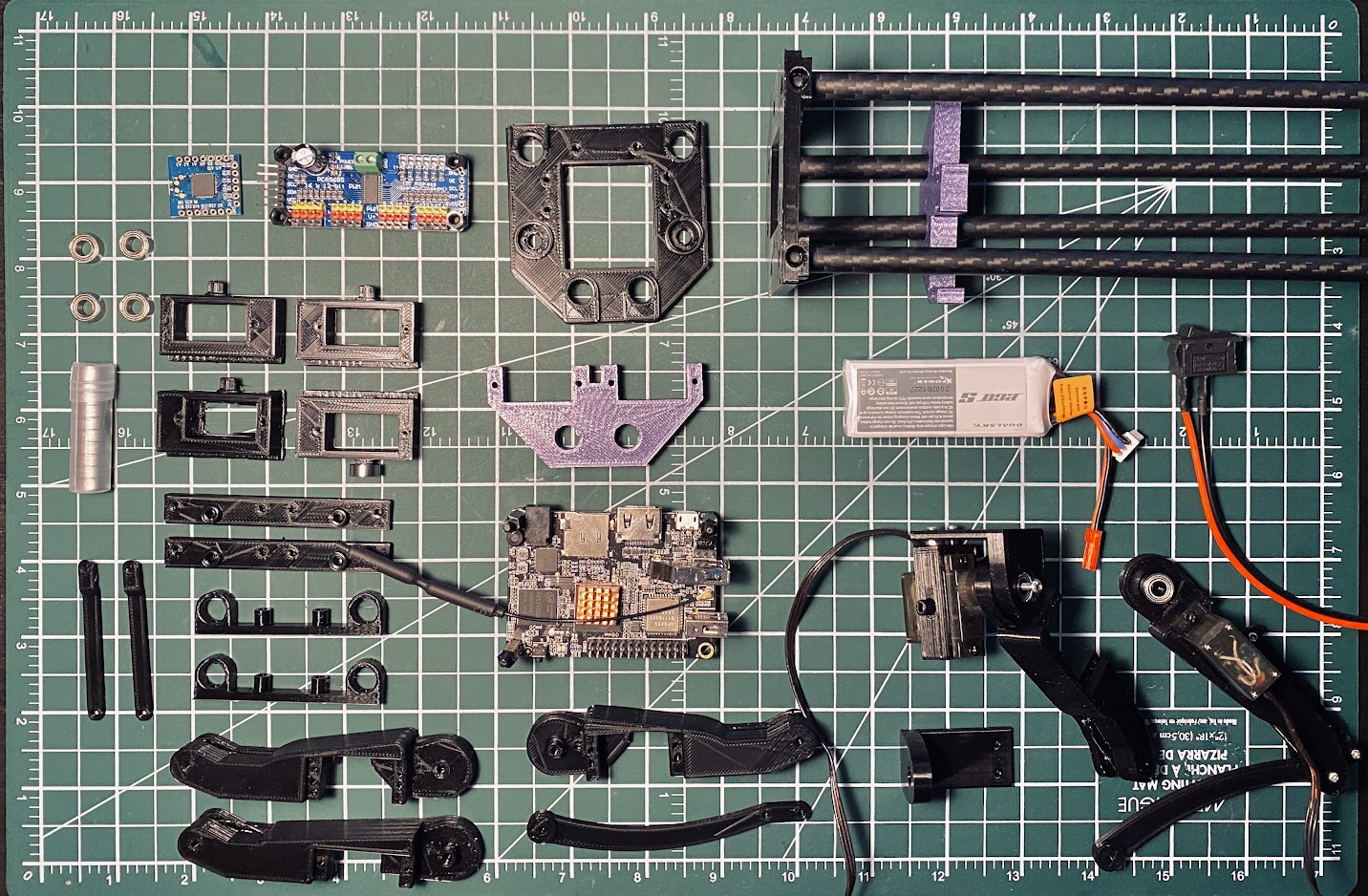
Mechanical Parts
4 carbon fiber tubes are used in the torso. A lot of design changes were made to make sure the same amount of electronics as Quadruped Tsuki can be fit in a way smaller body.
Videos
1) Inverse Kinematics Test
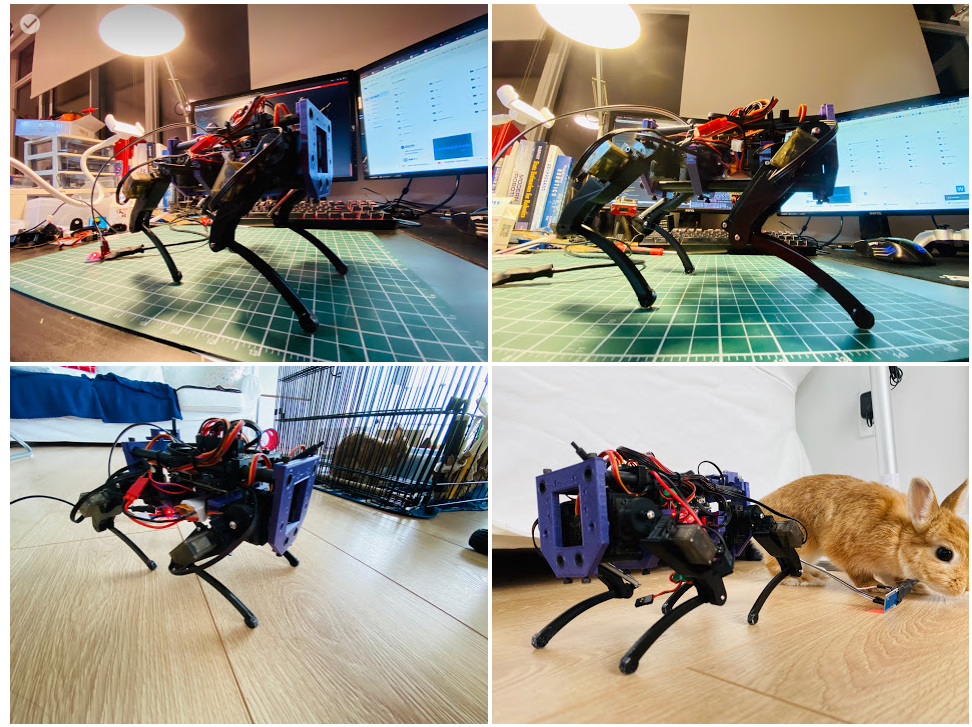
2) First Steps on the desktop
3) Walking on the ground
4) Disturbance test
5) Hanging out with rabbits
Conclusion
MG90s servo motors are not very good. They jitter a lot when I get everything assembled (not obvious to see in the videos because the jittering usually happens when the robot is lifted off the ground), but good enough for some simple walking around. I will probably replace these no-brand MG90s servos with better ones with similar size and from legit brands next time. Stay tuned.
grea,great,great sir……is it open source
i am gonna replicate it sir
in ROS sir
You can checkout my previous project’s code https://github.com/zlingkang/quadruped_9g that is fairly similar to this one
sir how did you calculate massa and torque requirement ,did you use any software to calculate torque requirement or ?
Hi, I’m a robot enthusiast maker looking for a project to replicate to learn more about robotics and yours is fantastic and meets everything I’m looking for! Would it be possible for you to share the stl files and source code? Do you have patreon or something similar?
Best regards!