Introduction
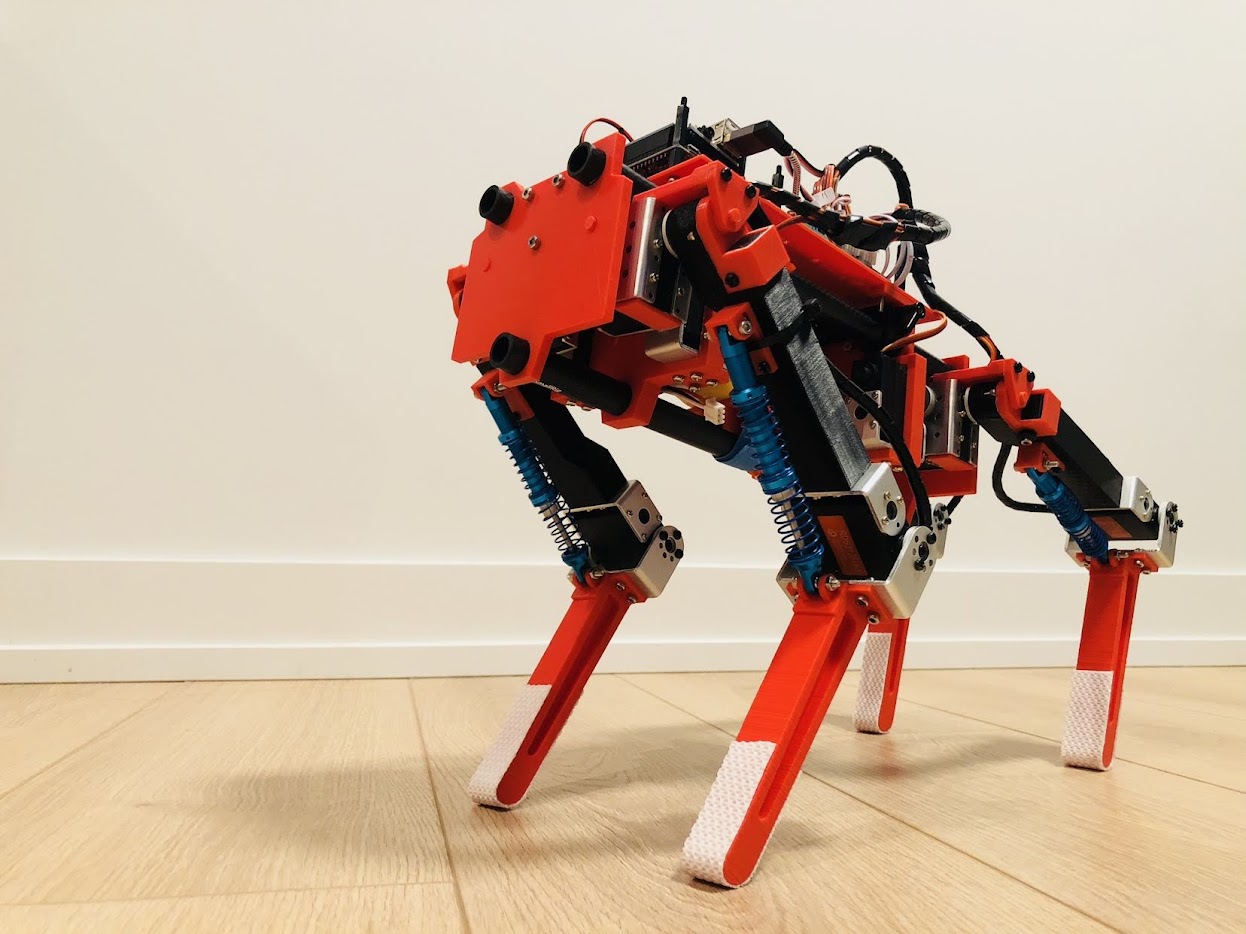
A ROS-enabled highly-dynamic quadruped robot. A brand new design that is stronger, faster and more robust than Quadruped Kaze.
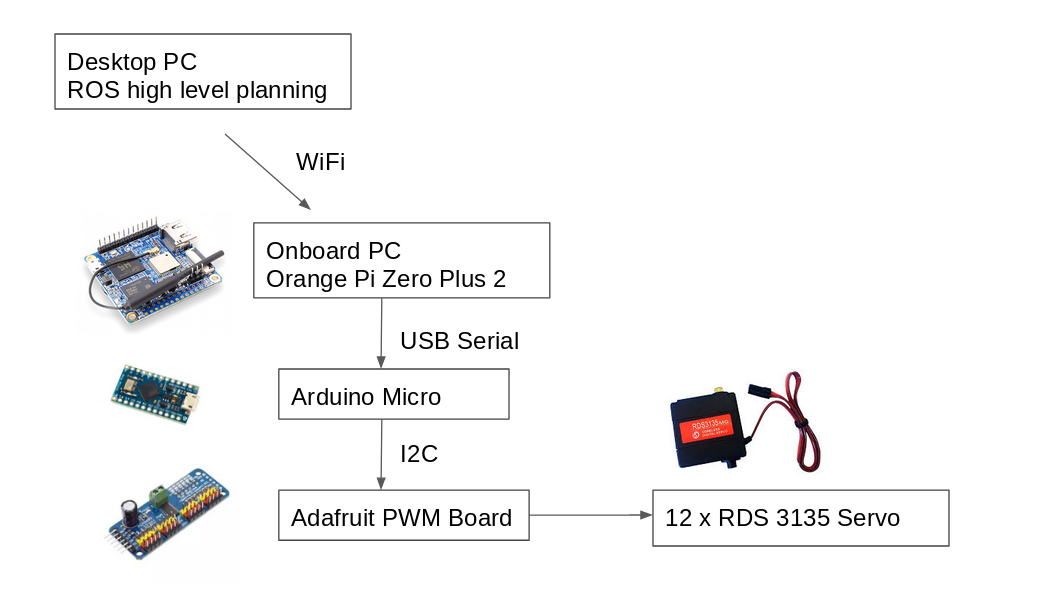
Hardware
Actuators
Tsuki was designed using Fusion 360. He has 12 degrees of freedom. 12 RDS3135 servo motors are used as actuators. The motor driver system is exactly the same as Quadruped Kaze.
The total body length is 30cm, the thigh is 15cm and the shank is 15cm.


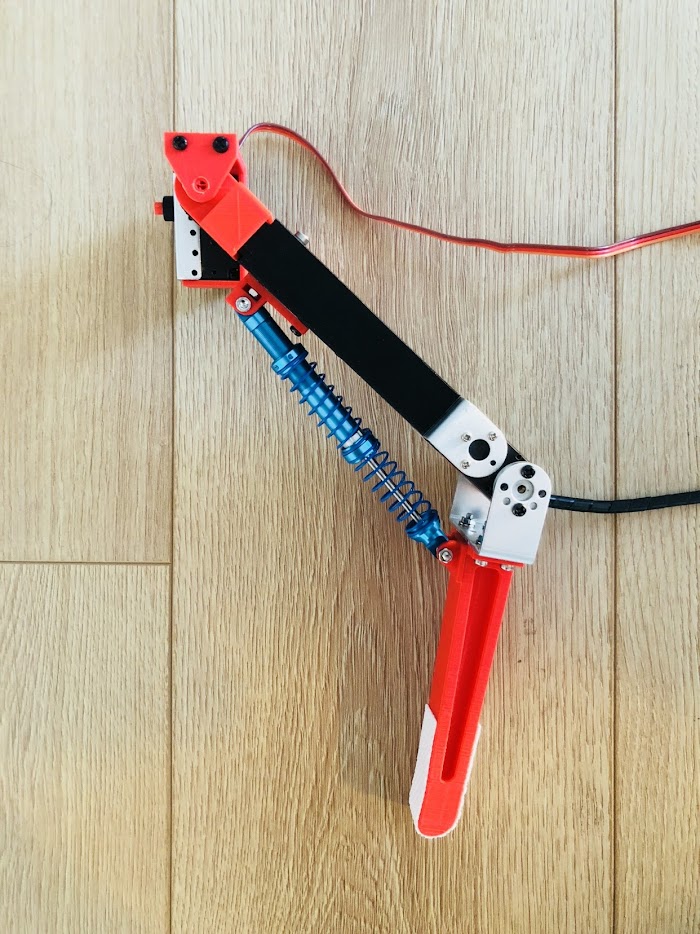
Leg
Dampers are added to each legs to reduce the torque required.

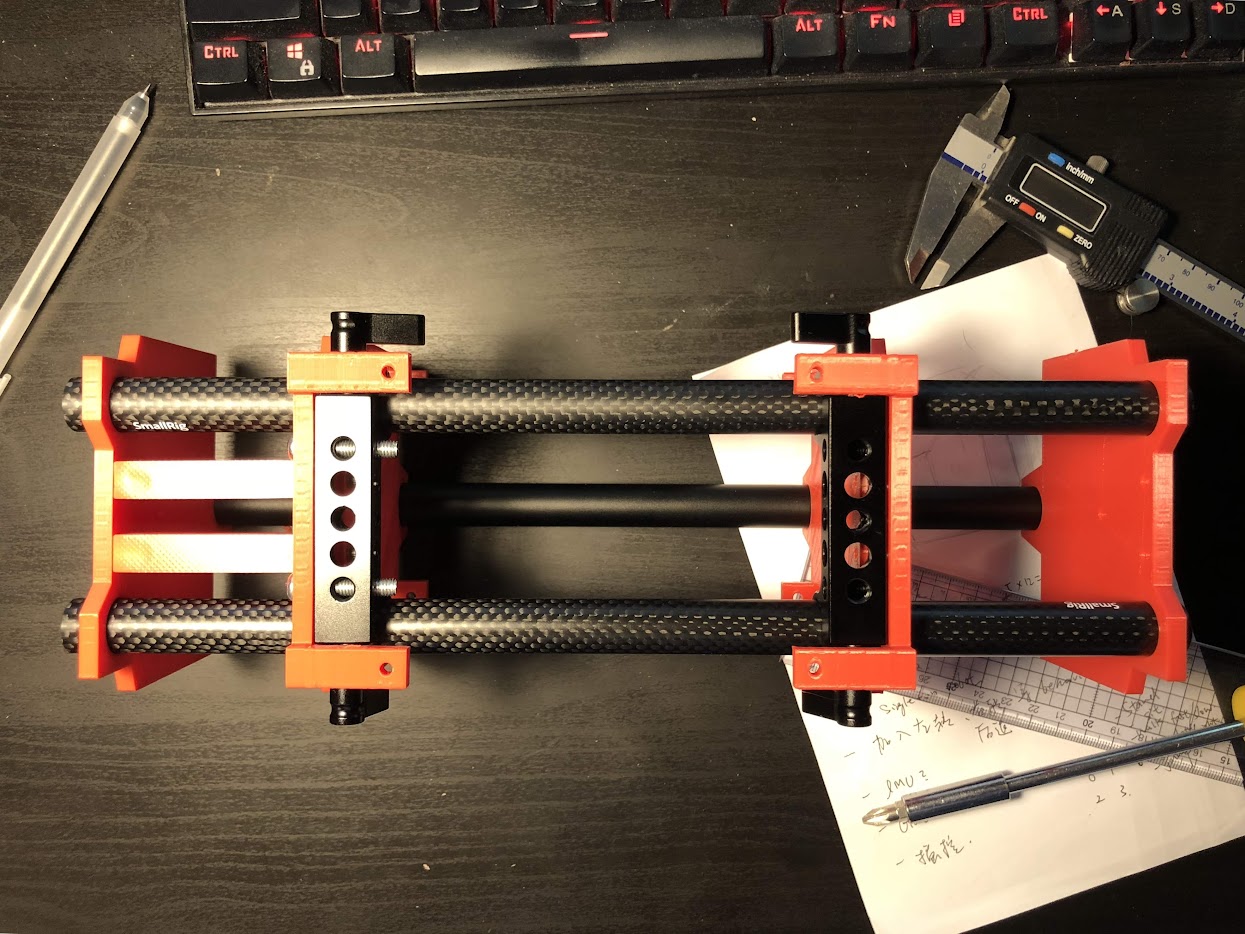
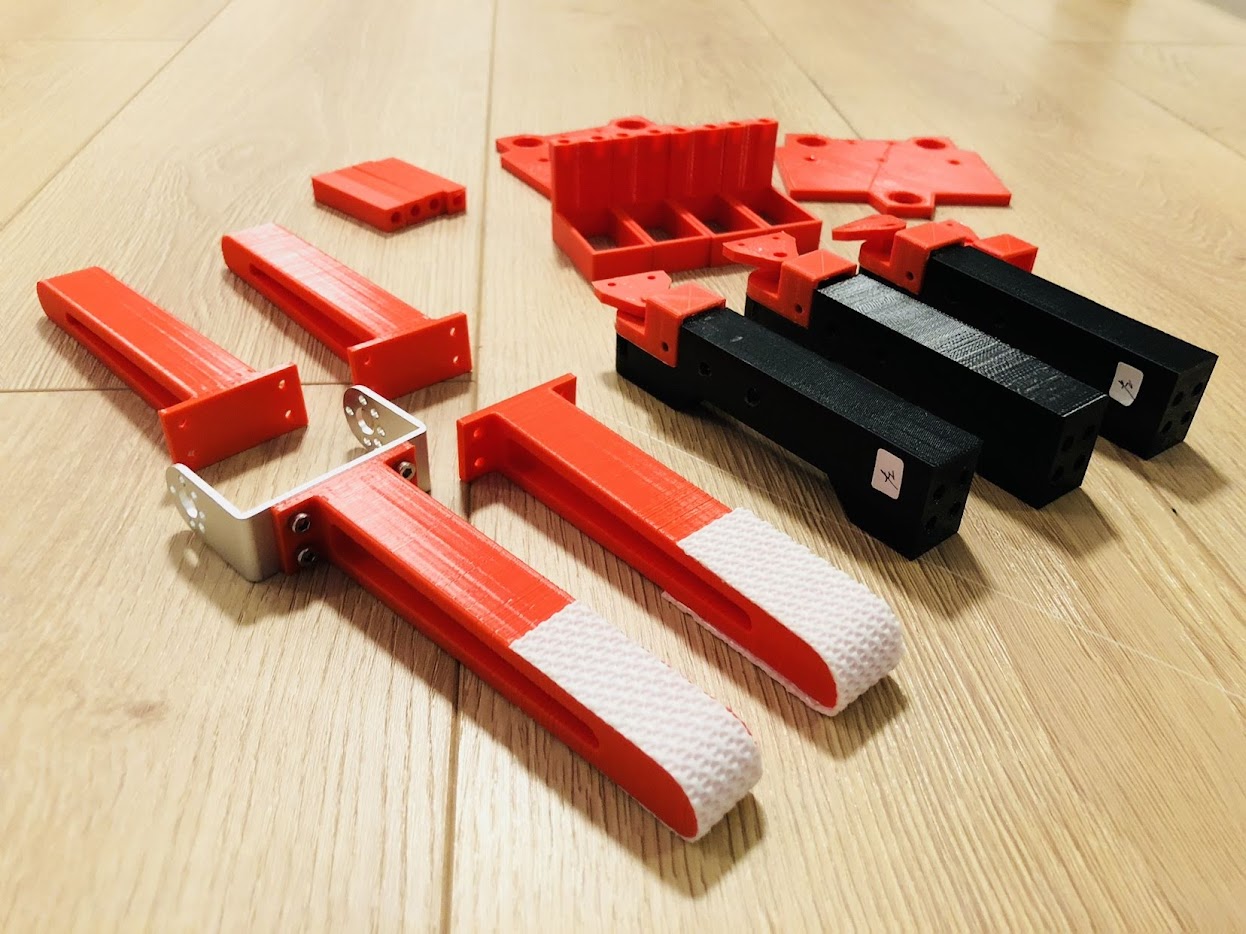
Mechanical Parts
3 carbon fiber tubes are used in the torso. A number of improvements in the 3D printed parts are made and it has way less backlashes compared to Kaze.


Software
No IMUs or foot contacting sensors are used at the moment. All the control are simply “position control”, not force control involved. The basic idea is to imagine the four legs are four robotic arms and take turns to lift up or move forward. ROS is being used for the high level control.
I may open-source my code later. For now, if you are interested in it, you can checkout my code for Quadruped 9g (Not actively maintained).
Videos
1) Inverse Kinematics Test
2) ROS Gazebo Simulation
3) Joystick Remote Control
4) Trotting 1
5) Trotting 2
6) Fast Move (~1m/s)
7) Acrobat
8) Rviz Demo
Conclusion
I was a bit supprised how good the performance I can achieve with pure position control and no external feedback sensor in the loop (IMU, contacting sensors etc.).
The downside is that the motors can be easily worn out since the whole thing is heavy (2kg) and I have to fix little 3D fragile parts all the time. Also, I need to tune a bunch of parameters to get it work properly for different speed and different floor.
More details comming soon…
I am sorry to disturb you.
I am a japanese student.
I am impressed by your quadruped robot project.
I was amazed that it was extremely stable despite its small size.
I also want to develop a robot like you.
Have you tried many times to find the most stable foot trajectory?
Have you tried many times to find the most stable foot trajectory?
Could you tell me what algorithm this robot is walking by?
Hello Shoma, I did try out different parameters setting to get better performance. I have the code opensourced for my previous project, which is pretty much the same as this one but smaller. You may be interested to take a look: https://github.com/zlingkang/quadruped_9g
Your project is really great.So it will be helpful.I will also try to develop a robot like lethic.I am always cheering for you from Japan.Please do your best from now on.
This is my Twitter account.
https://twitter.com/ohaginia218
Please follow me if you like.
Thanks Shoma! Just realized that I have already followed you!
amazing, I am a Chinese student which is also very interesting of your four legs robot.
Hello there!
Good job on your robot! I build a similar one, but I have to admit my focus lies on the control software, thus the mechanical part is not as good as yours.
Currently, I am in the process of improving the mechanics of my robot. For example, I would like to use some dampers just as you did it (but in another place, relieving the shoulder servo)
I could not find any good dampers yet, as most of them are made for RC cars. I would be very pleased if you could tell me the product you used in your robot. Maybe I can use it as well.
Thanks and greetings from Germany!
Hi there, the exact model I used is from Amazon https://www.amazon.ca/gp/product/B07FS9QKL7/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1. Most of these type of dampers are pretty similar, just search for “shock absorber” and you can find all sorts of variations.