Introduction
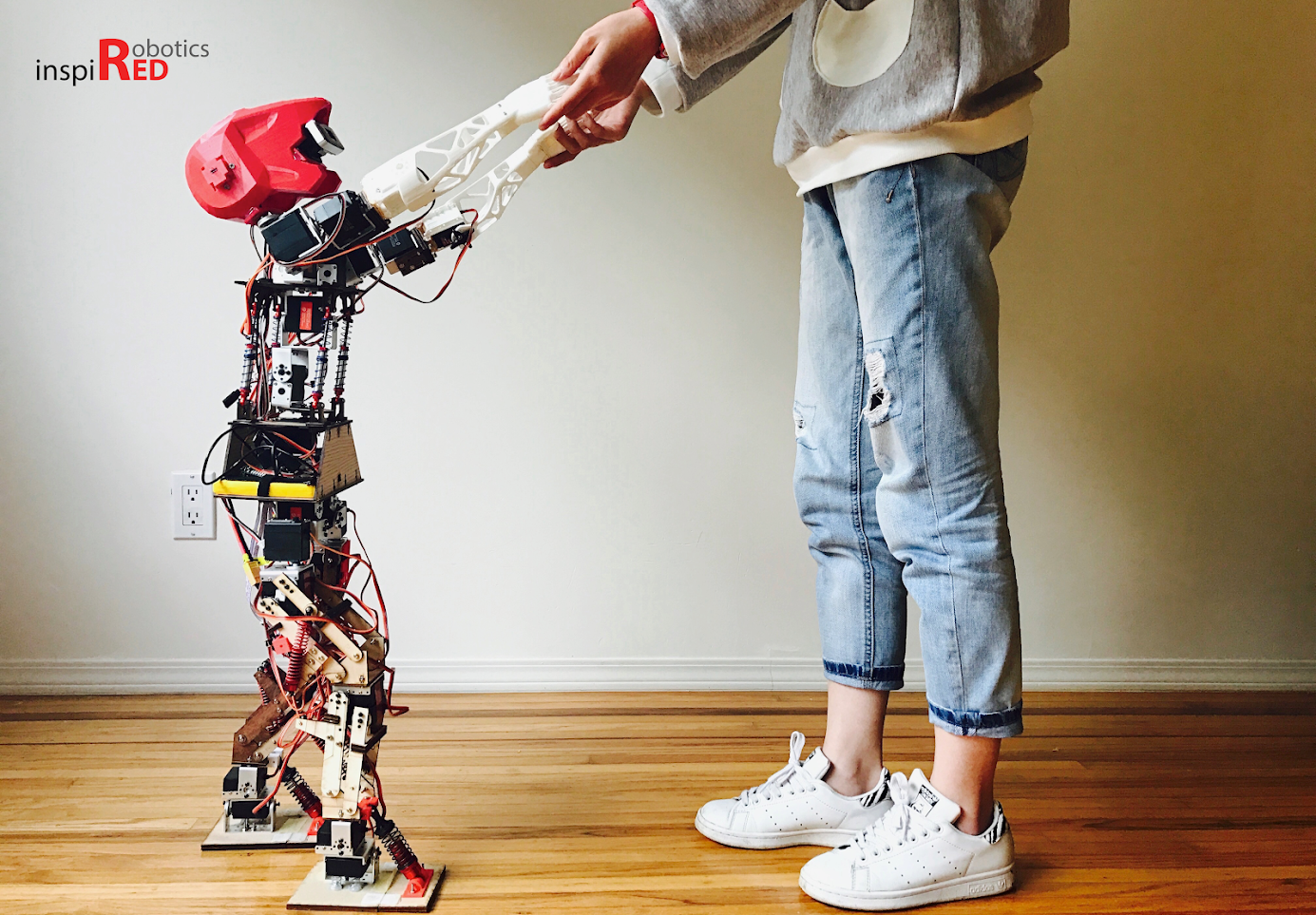
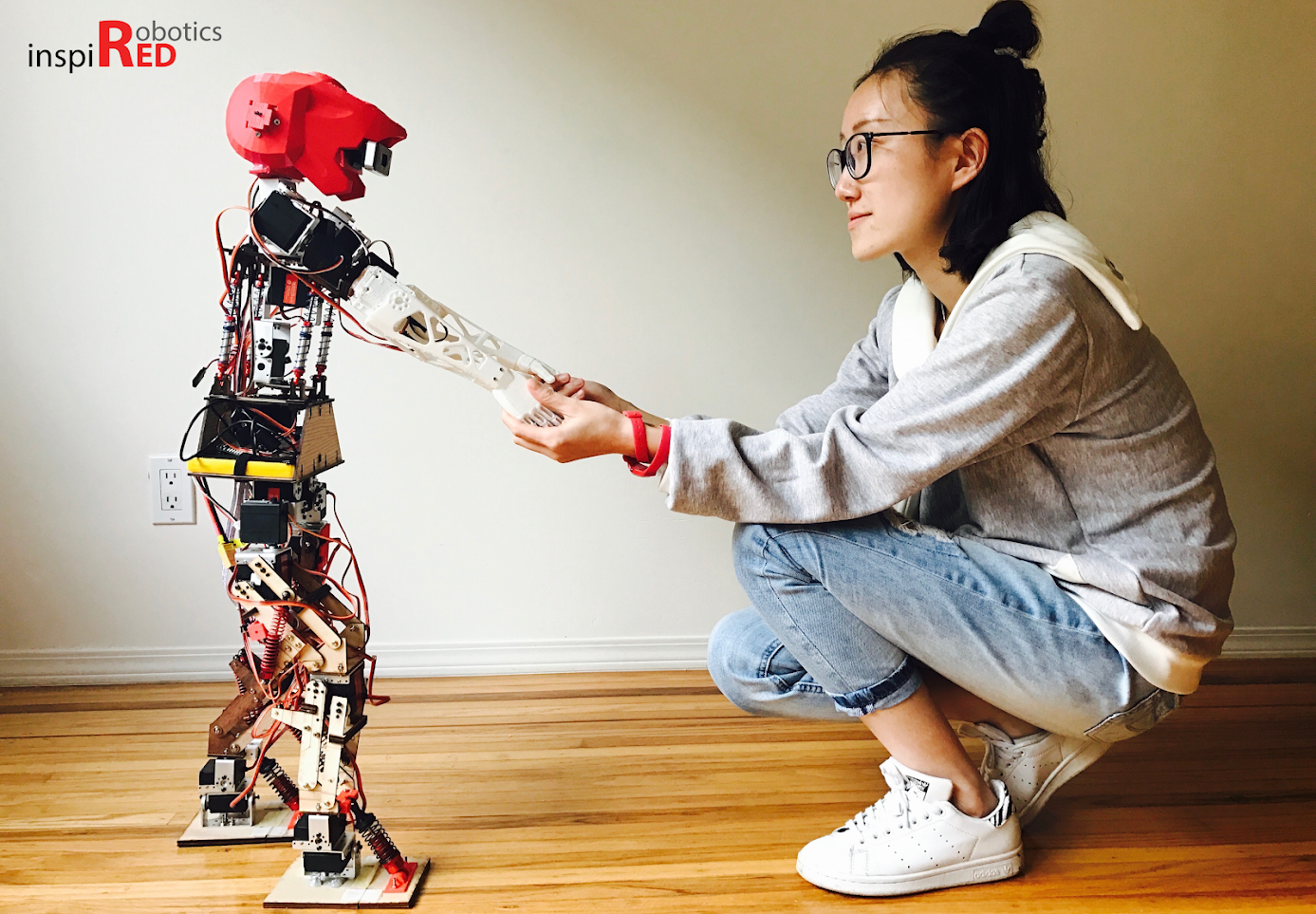
The second generation of inspiRED humanoid robot, a child-size (80 cm) humanoid robot. Its controller is a low-cost but powerful single-board Linux computer Odroid-U3 and we use ROS and Open-CV with it.
Previous Work
The main difference between this version and the previous one as shown below is that, the new generation uses CAD software to model all the parts which are then laser cutted, while the previous one was hand crafted plastic parts.
Discussion
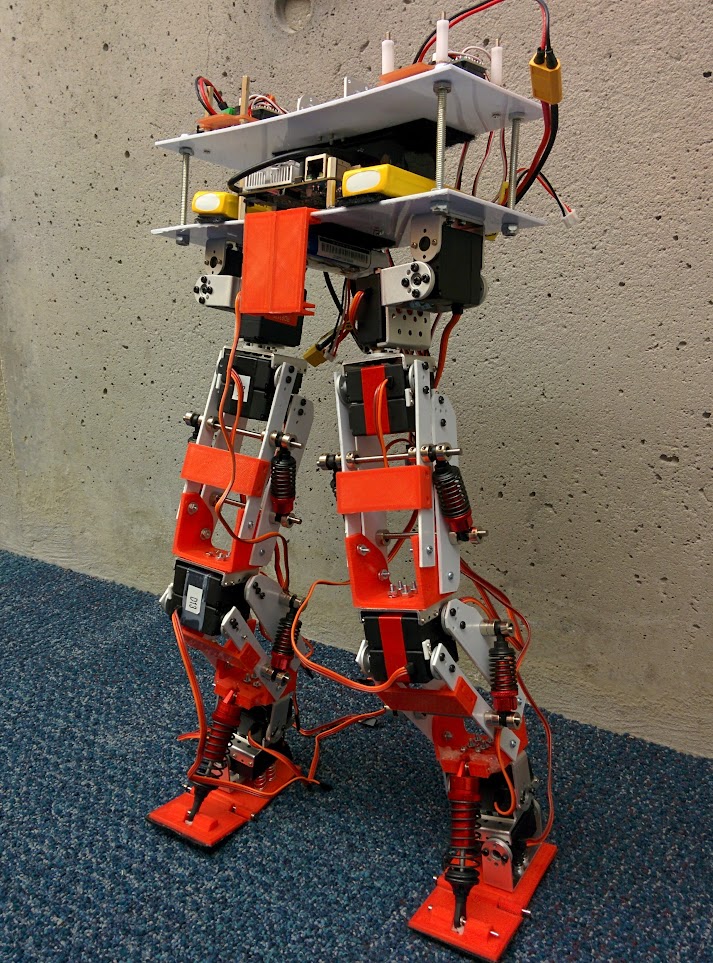
The Pololu Maestro board is used for low-level control of all the servos. The Odroid is running ROS and sending commands to the Maestro board via serial port. The leg uses double servo for the knee and thigh joints and chain stucture to achive higher torque.
The whole robot is too heavy and there are lots of back backlash, which makes it impossible to walk unfortunately. I guess I will build a smaller for the next version.